I’m planning to use Herelink in combination with Pixhawk on a USV (Unmanned surface vehicle) that I’m building. I want to connect my laptop (maybe just monitor) to the Herelink controller, but I cannot find exact information and experiences so I wanted to ask you guys for your help.
If I connect the Herelink controller via USB(to share Wi-Fi) to a laptop with QGround Control, what will the laptop screen show? Is it just mirroring the display or can the laptop be used to control the USV (mission planning and camera stream for example)?
Also, if the laptop is connected to the Herelink controller via USB, is the controller being charged?
I am planning on using Herelink on relatively remote locations, where I don’t have access to outlets and I will have to use batteries/power banks, which is why I’m wondering how long does the battery last, and how does being connected to Wi-Fi affect the battery life? One can never have too much batteries/power banks
If anyone has already done any of these, please share your experiences because every little thing helps.
I have read that document you sent, but instructions were a bit unclear to me, so I hope you can help me with a specific question.
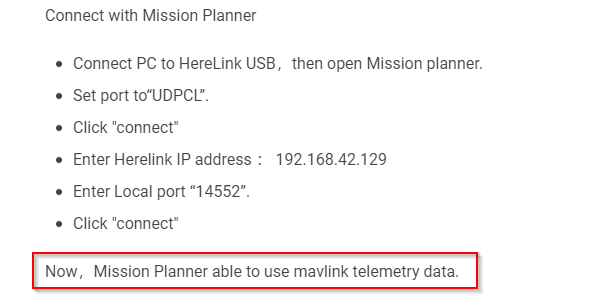
In the “Connecting over USB tethering” chapter it says that Mission Planner is able to use Mavlink telemetry data. Does this mean I can also plan missions or control the USV via Mission Planner on a laptop?
See screenshot below highlighted in red to better understand what I mean.
Also, how does this work in QGround Control? Instruction document describes only video stream, nothing on the telemetry stream or mission planning.
I would like to hear your experiences with your own Herelink controller battery, what is your controller’s approximate battery life?
Thank you once again and kind regards
P.S. I hope somebody else will share their experiences