Hello all,
2 days I go and during an auto mission drone (cube autopilot 3.6.11 and herelink controller) stop to move (without any reason) and I change it to Loiter so to land it safe. Then I realize that every move I was making drone execute it with lot of delay so finally it crash because I lower throttle and It was descending fast and despite I was raising throttle it was still descending, then hit the ground hard and then start to ascending again. Could you help me what went wrong?
I attached log file2019-10-23 13-09-45.zip (1.2 MB)
Motor 1 was failing from the start.
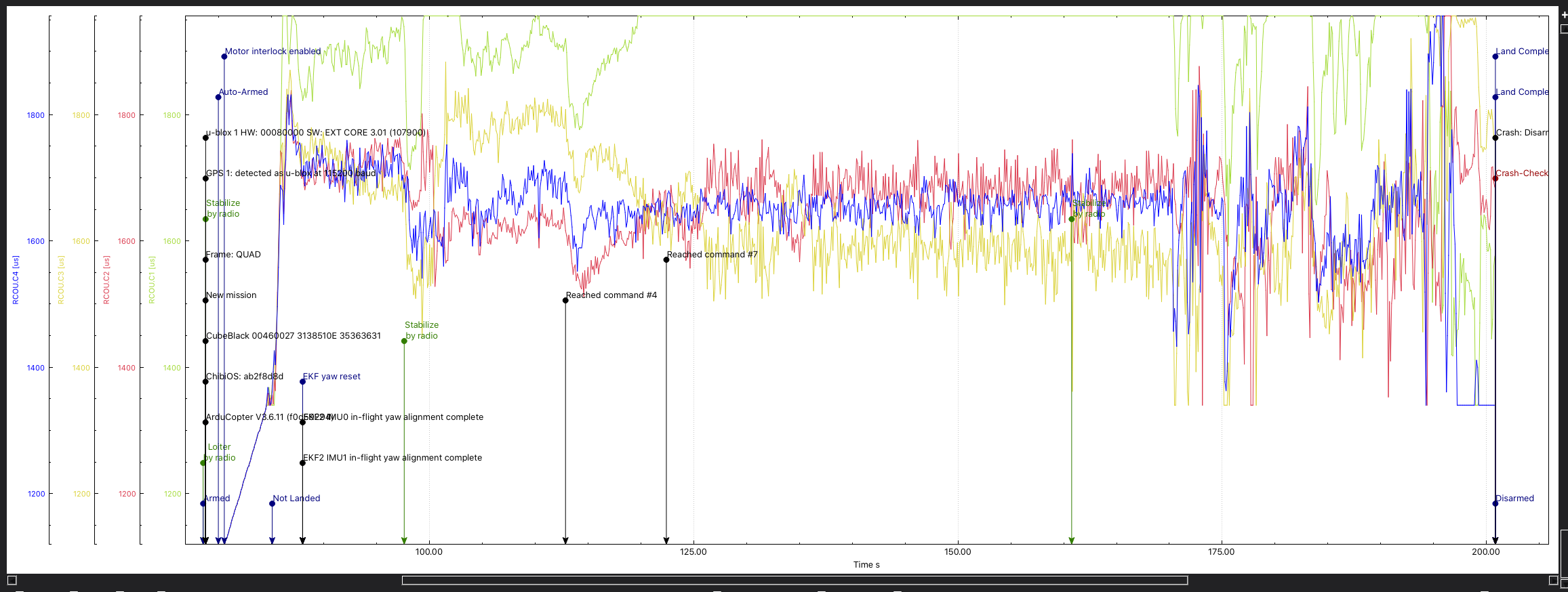
Mechanical issue, motor or ESC or prop loose or …
You were fortunate it stayed in the air so long.
1 Like
Thanks Mike!