Hi after upgrading from pixraptor to pix 2.1 cube black flight controller my quad cannot fly anymore. upon takeoff it shakes and drops on one side. I was trying to recalibrate it twice also tried to use different gps versions can and l2c nothing helps. its looks that fault is mechanical maybe inside cub or carrier board. here i have uploaded my parameters and few recent logs. would be really grateful if someone could review then and find problem solution:
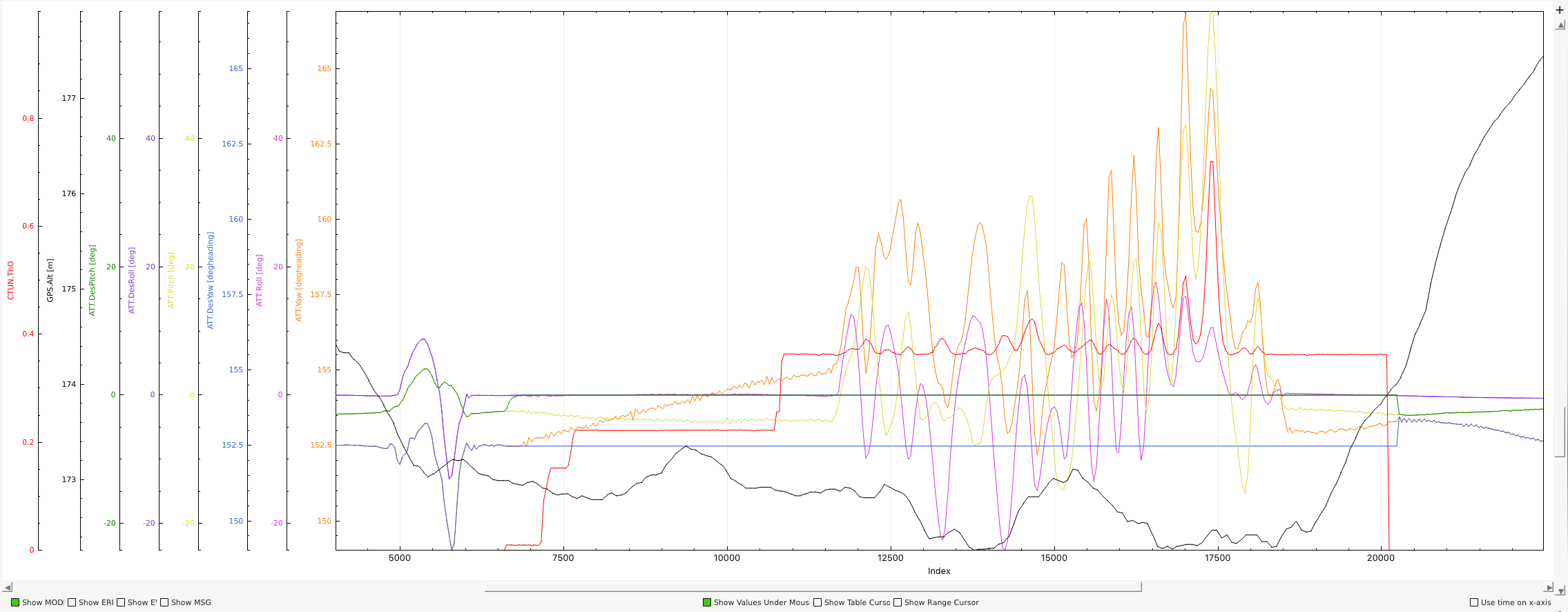
As the motors pick up slowly the yaw starts to deviate from desired and the others after.
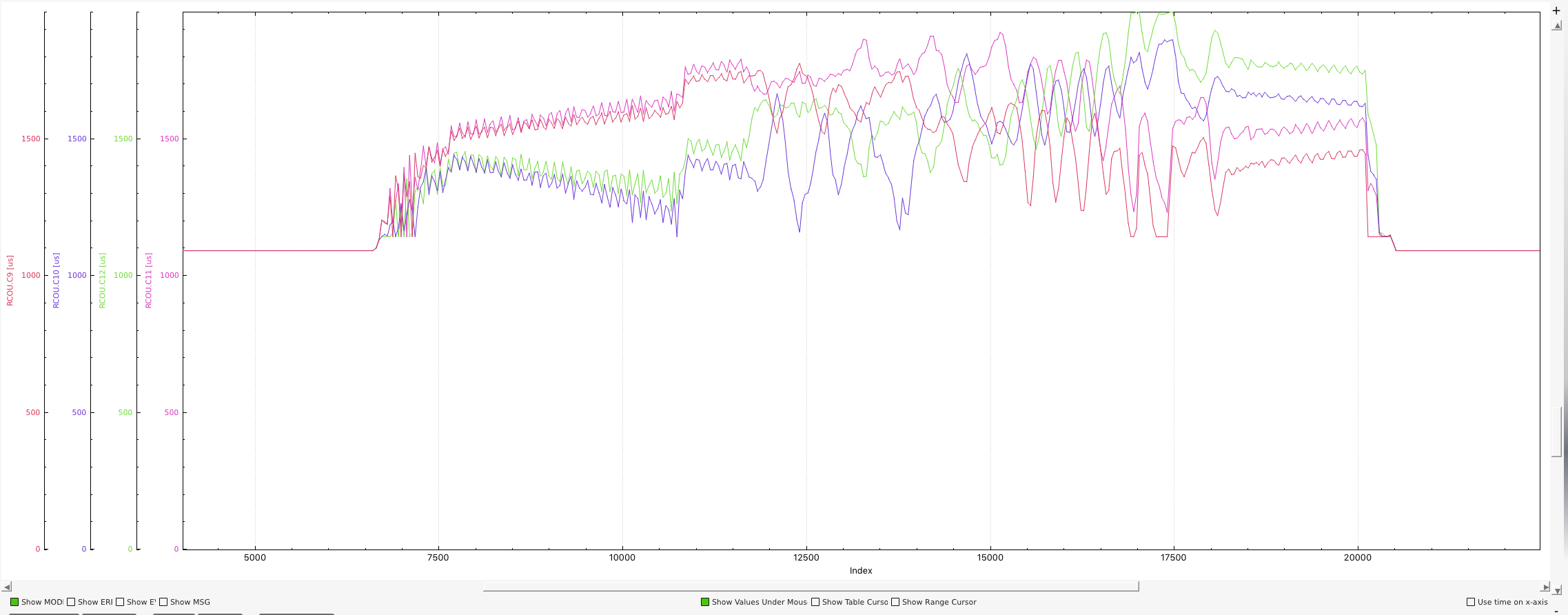
The over sensitive tune after lift off combined with a sudden correction in all axis’ and the oscillations start.
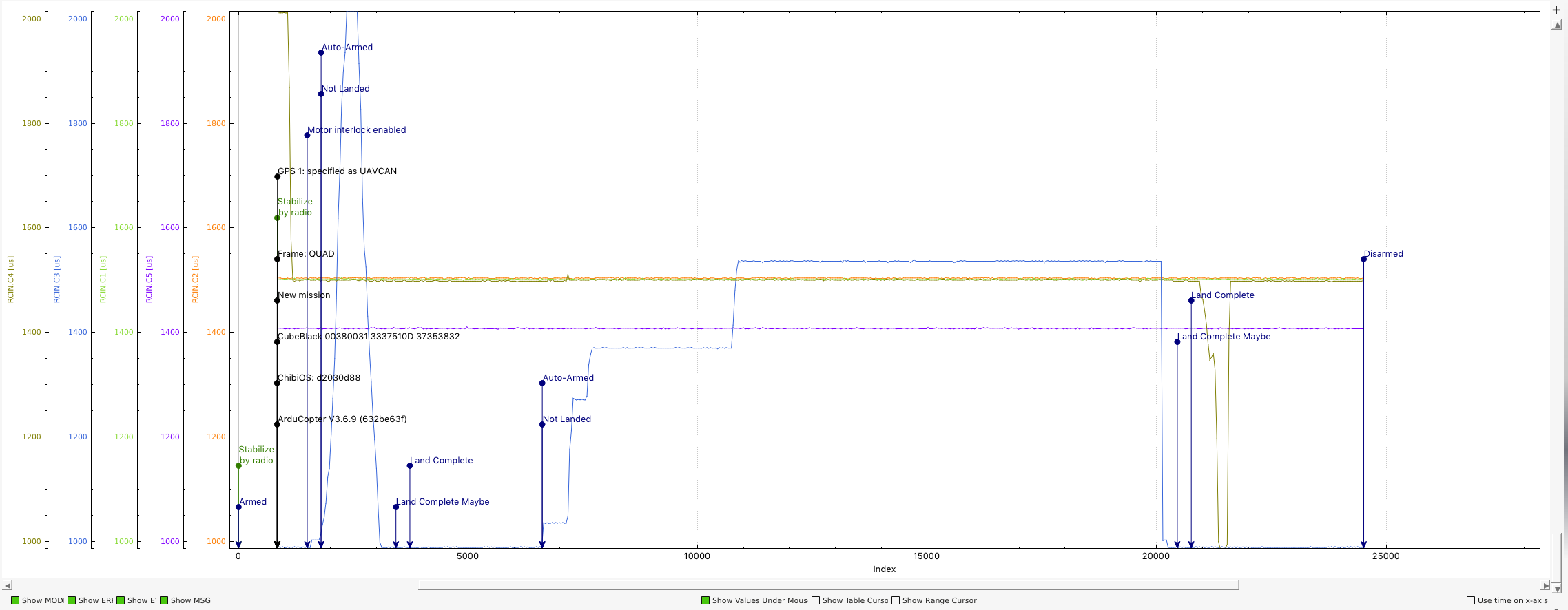
It look s very much like you just spent too long on the ground armed with the motors spinning before lift off.
The over tune is going to probably get it oscillating again with any sudden movements so lower your gains to begin with.
You just need it stable enough to do an autotune.
I did notice you did not attempt to correct any movement with RC input??
What sort of surface were you on when trying to take off?
Could the quad move about, such as a hard surface, or soft grass or clumps where the feet cannot slide about?