I already calibrated my power module and this is the result of calibration…(my 2nd flight logs and parameters)
I will do calibration again soon.
and I will leave the harmonic notch filter
I already calibrated my power module and this is the result of calibration…(my 2nd flight logs and parameters)
I will do calibration again soon.
and I will leave the harmonic notch filter
sorry for late reply.
it was very hard day for me.
I changed 1 motor because of yaw imbalance. but new motor’s screw breaked very easily. I drilled my motor and eliminated iron powder inside motor all day long.
when changing the props, I used long props so it was overlapped each other, so I made motor mount that make number 1,2 motor mount high than number 3,4 motor.
that is why my answer so late.
although my first question was about current data, now it is out of my sight.
because voltage reading seems to have no severe problem.
and there is much more severe problem.
now I’m concerned with yaw imbalance, so I will post this problem on the forum seperately with this article.
I thought it could be solved with changing props, but changing props didn’t helped.
I dig into old logs, found there was no yaw imbalance at first flight.
yaw imbalance appears after 2 crash of my radio experiment.(in mid of august)(the experiment was about malfunction of counterfeit spektrum receiver),
posted logs on this article also includes yaw imbalance.
with my eye, I see no twist or damage on my motor, frames but it seems that there is damage on motors or frames because there is yaw imbalance after crash.
thank you.
Thank you for your pid value, but I’m planning to change my prop again.(because of insufficient thrust for lifting cargo and yaw imbalance.) so after changing my props I should find another pid value.
now I have to solve the yaw imbalance problem…
I dont know whether this is useful, but I post very first flight log which doesn’t includes yaw imbalance
https://drive.google.com/file/d/1St-jK8lROFnRYlt0bdtQrZ9xwKlbhUqC/view?usp=sharing
this is the log includes yaw imbalance. 2022/10/01
https://drive.google.com/file/d/1OD2vUOuANsrMRtnwFcCaSUoHO8EDZyPY/view?usp=sharing
when copter hovers I can feel the my copter heading move from side to side every few seconds.
and it made me nervous. even that problem will be cleared after auto-tune.
I will upload seperate article on this problem. thank you…
https://drive.google.com/file/d/1lqbk3jnUAGxW1Z3QJP0AFW47JNH3N5Aw/view?usp=sharing
long time no see, it is my flight log after changing my props to 13 inches and attaching damper on FC.
I couldn’t solve the vibration problem on my quad, so I installed damper.
(APM2.6 APM2.8 Pixhawk 비행 컨트롤러 보드 용 1pcs 진동 방지 세트 충격 흡수기|shock absorber|absorber shockflight control board - AliExpress)
I’m planning to move on bigger props(14 inches)
I observed the vibration meter on mission planner while I fly my quad. most of time it was under 30m/s^2.
very occasionally, I could see the heading swaying from side to side severly.
and unlike before flights, position hold was little bit loose. sometimes it flew to side.
Vibrations are still a bit too high
Change the HNOTCH filter settings as follows
INS_HNTCH_REF,0.22
INS_HNTCH_FREQ,60
INS_HNTCH_BW,30
INS_LOG_BAT_OPT,2
and these position contrller settings (halve their original values)
PSC_POSXY_P,0.5
PSC_VELXY_D,0.25
PSC_VELXY_I,0.5
PSC_VELXY_P,1.0
You can see on the map the effect of the vibrations
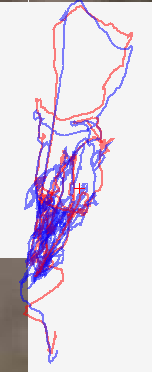
The IMU position and GPS position never line up, the red and blue lines should be ontop of each other.
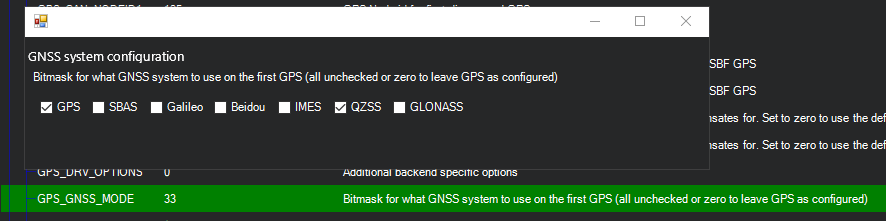
Also GPS HDOP is poor, try different values of GPS_GNSS_MODE, select only 2 constellations
until you get consistantly lower HDOP, or ideally a faster time to set Home (see FENCE setting below)
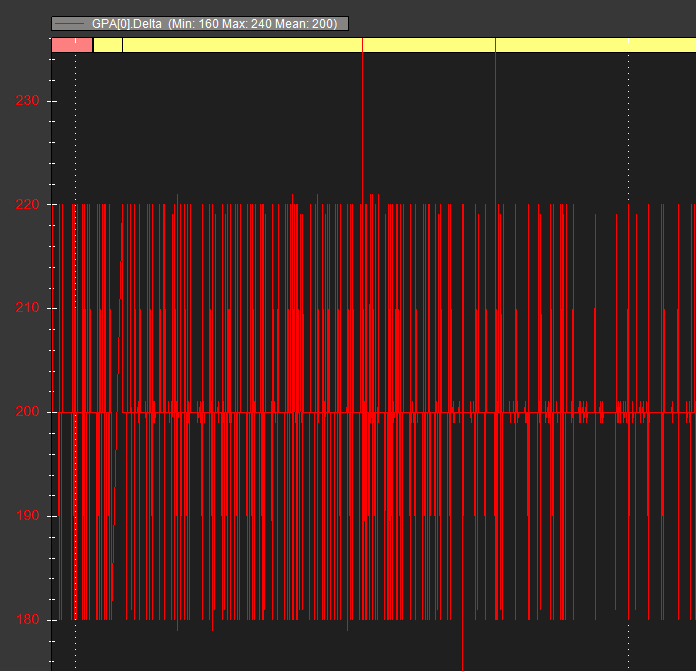
and more consistant GPA.Delta in logs, this should ideally be a straight line across 200ms
For safety I recommend you set
BATT_ARM_VOLT,22.10
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
FENCE_ENABLE,1 ← this will make you wait until Home can be set before you can arm in ANY mode
EDIT:
See if you can do a firmware update on the CAN GPS unit too
thanks,
when I saw vibration meter decreased after installing damper, I thought the problem was solved. thank you for inform me the dangerous.
I’m now using overlapping 13 inch props & big motors(tarot 4008) on little 450 quad(tbs discovery). Im even using 6 cell battery.
I guess it is the reason of vibration.
maybe I have to balance each props with tapes, to eliminate vibration as much as I can do
I will try your settting value, thank you
and I guess, reason of low hdop is that I flew my quad near building
I will see hdop also when I see log next time
very thank you for giving me insight on logs…
I don’t like the idea of overlapping props. That will be enhancing vibrations.
What is your reasoning?
Probably 11inch would be the maximum prop size, or even 10inch.
I thought there would be no problem with overlapping props other than efficiency problem.
I overlapped my prop because I wanted to lift 2kg but big drone is difficult to store or moves.
I wanted to build small drone that can carry heavy things.
It seems that lift is enough now(mot_thst_hover is 0.28) but only problem is vibration…
And youre right. 11 inch prop is maximum if I dont overlap props. Im now using 13 inches and planning to move on 14 inches…
You’ll be on your own. That is the wrong way to go about it.
The vibrations from props overlapping props and overflying the baseplates will cause a fly-away or other problems.
I believe it’s unrealistic to just keep going for bigger props on a small frame. It’s like thinking your Hyundai Exel can tow a 10 tonne trailer just by putting on bigger wheels (sorry, car analogy…)
Correct sized motors and props can certainly lift a significant weight.
11 inch HQ props and PROPDRIVE v2 3536 910KV motors with a 500mm frame with 3S lipo.
And you wont believe what a set of 12inch MasterAirscrew MR props will lift with those same motors and 4cell lipo on a 650mm frame.
Many would cringe at the mention of those motors, but damn they can lift!!
thanks a lot.
I have never imagined before that 3s or 4s can lift heavy things. I will try later that setup…
I’m making delievery device of drone. it weighs about 1kg.
this quad is for the test purpose of that device.
because it is not for actual long distance fpv, I think it is acceptable problem.
I will move on to bigger drone if my own project success and there is need to go on further.
I will adjust the prop balance and reduce vibration. for the test purpose, with extreme caution(with motor kill switch) it would be fine, as I think.
I will do at my own risk… thank you
I’m very sorry to disturb your holiday.
please only reply if you have free time…
I changed my props. I didn’t applicated parameters you said yet.
but only changing prop made my vehicle stabilized.
it holds position very well and my flight was satisfying.
for last I want you to review my flight log… I know the flight is in my own risk with this over-heavy quad
but if you review my log it will help me.
and I didn’t changed GPS settings because I guess gps problem is because there is many very tall buildings near my flight locations.
I want to know whether if vibrations is okay because I applicated harmonic filter. I found the vibration is now okay(pretty good!) with new props. but If the harmonic filter is not applied, is the vibration level still in a serious range?
and there is no settings I have to change? before I remember I turned on some logs settings as you said, I wonder if I can turn it off now…