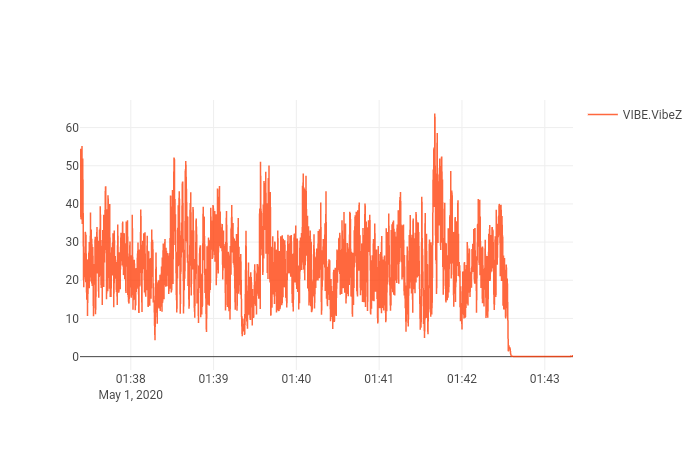
Thanks! Yes, I saw that, but the first 2 IMUS are under 20, so in this case is not the problem I think. When the vibrations are a problem to maintain altitude, the altitude readings are bad (I lived that some years ago, altitud goes from -3mt to 100m in 1 second), in this case, are very good.
As you see in the picture, the altitude readings are ok.