Can anyone tell me what happened here?
I took the copter off and up then it just started racing West then back East right past me & out of site. It stopped & hovered above a baseball diamond I used for mission planning a while back. Then it fell destroyed copter & camera. I tried switching modes, I tried Auto but nothing responded to controls.
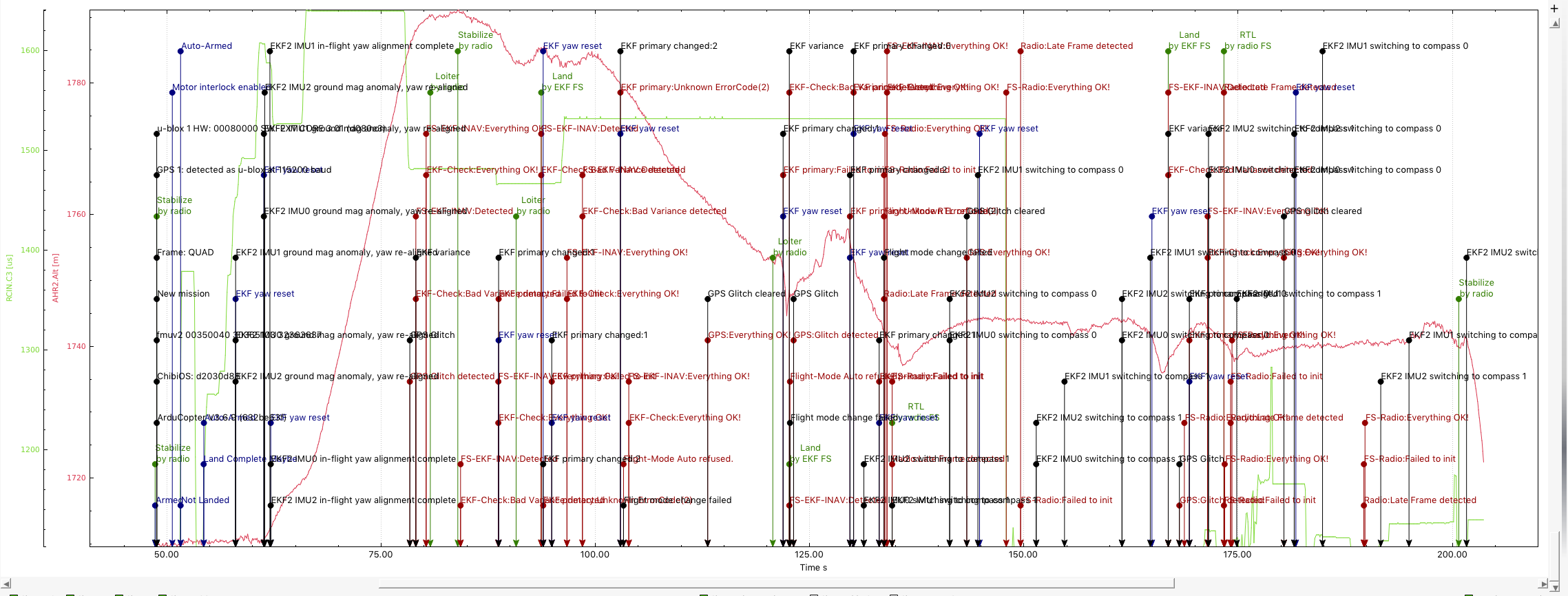
There were so many errors reported in flight I am not sure where to begin.
Falling out of the sky was due to switching to Stabilise and having the throttle at min.
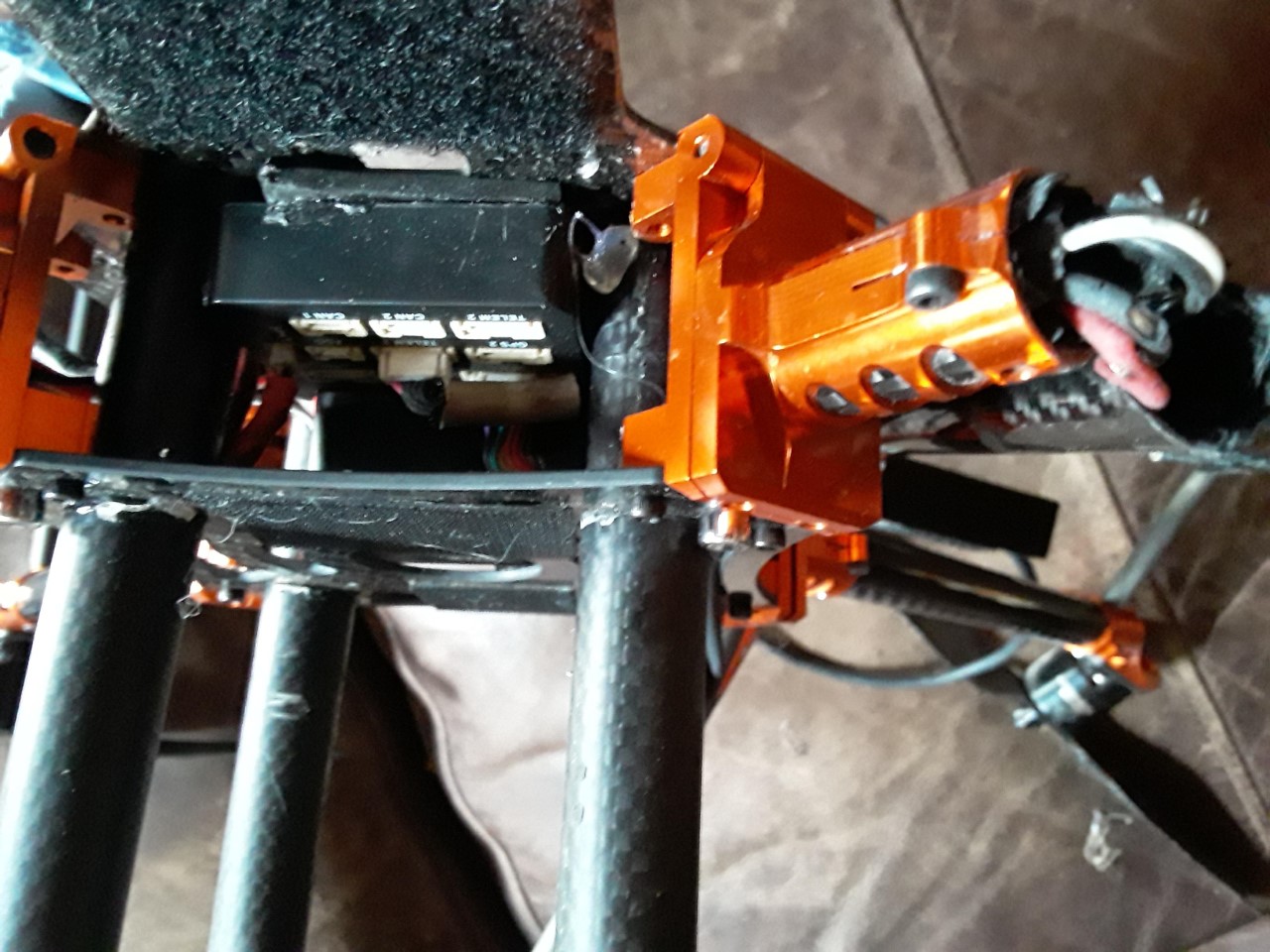
The extent of my wiring is only direct soldering to a power board. I am using a motor esc combo.
Please have a look at my build,I don’t see a problem. I agree I cut the throttle to crash the bird. Because it took out of my control off toward the fire station & radio tower then flew full speed right over the park playground. I had a VO tell me it was hovering above the diamond so I cut the throttle. The bird was endangering and completely out of my control…
The question I have is why the errors started on this flight. I have built too many drones to write this off as a build error. This drone was tuned and flew very good earlier that day and through a few days of testing.
What caused the EFK errors? Why did it fly away and not respond to RC?