Today I tested my octocopter based on Cube Black and Here 2. Everything is generally ok but during continuous yaw it descending always when the copter is facing south-east. The copter corrects the altitude after 2 seconds but it looks a little bit scary. It’s yawing in all directions ok and suddenly when it facing south-east the altitude drops about 1-2 meters.
I have 3.6.11 firmware and after new calibration of compass nothing changed the problem still exist. Do you think that’s problem connected with COMPASS_SCALE param which was fixed in 3.6.12 firmware. Does anyone had similar issues ? Where can I search for solution ?
Sorry for asking more… but If that’s aerodynamic effect why it happens always at the same direction ? It depends on from which position I started to yaw ?
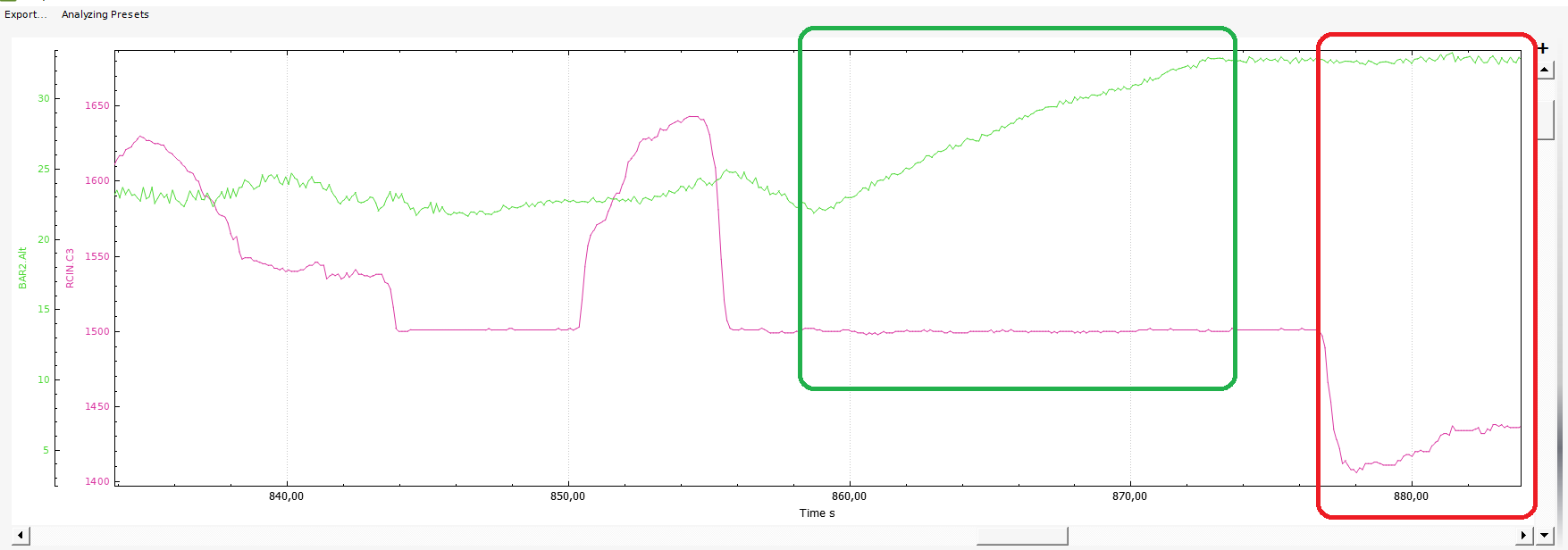
From the telemetry what I can see a little odd is how the altidude goes up but your THR is not moving in loiter (green square), and more obvius is in the red square you move the THR down, and the altitude remain there… I dont know if that is related with your problem, but is very odd, and if you have altitude problems, may be you have to start over here.
Thanks for help everybody. I updated firmware to latest 3.6.12 and changed COMPASS_SCALE to 1,17 and today during 2 flights I didn’t noticed the problem so I guess it was the cause. I will check this on future flights.
{kind=link}