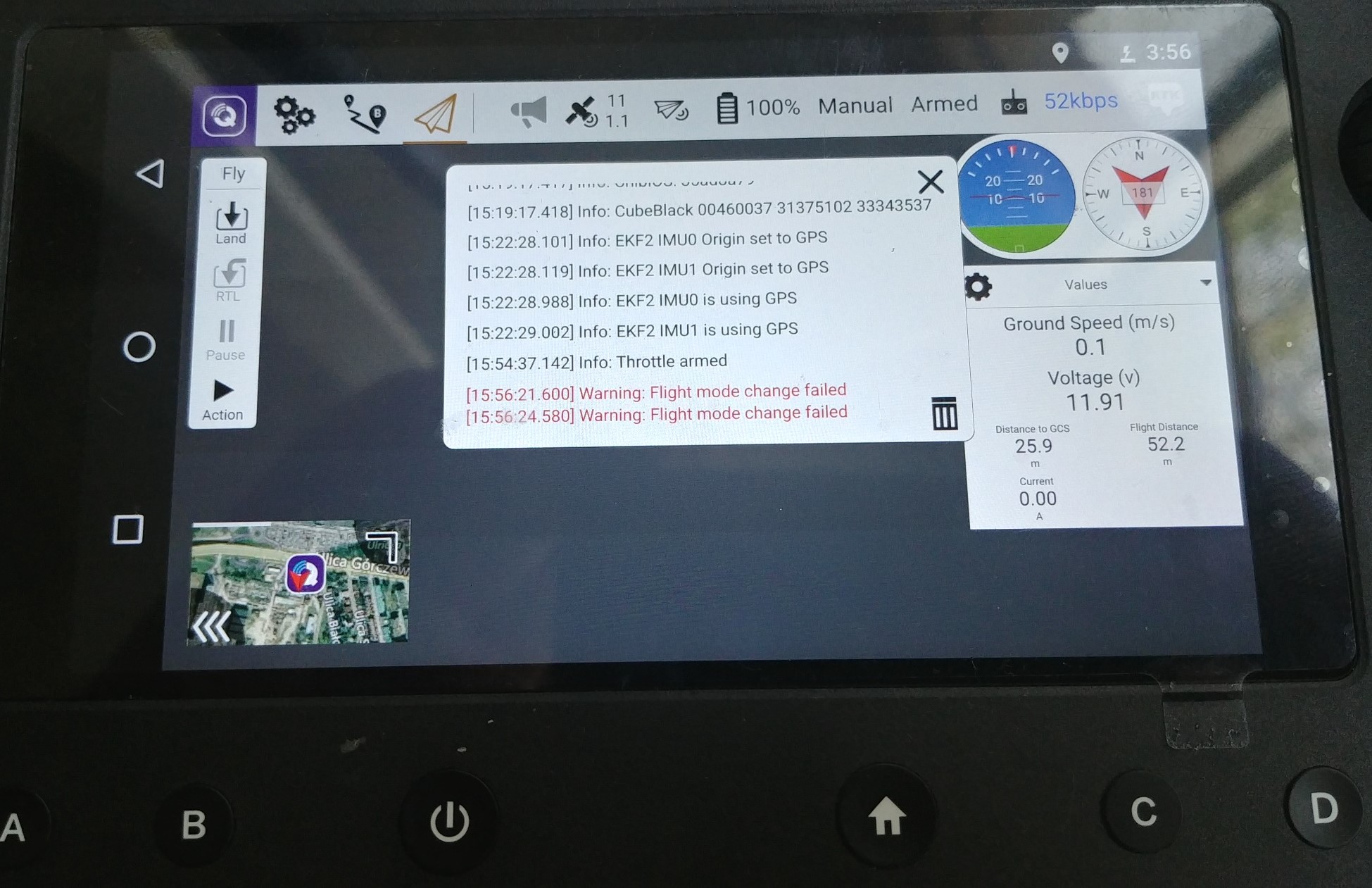
Hi, I am testing HereLink with our unmanned boat (ArduRover V3.5.1), I have a problem with mode switching.
When I arm the boat and choose to switch to Auto I receive “Flight mode change faild message”.
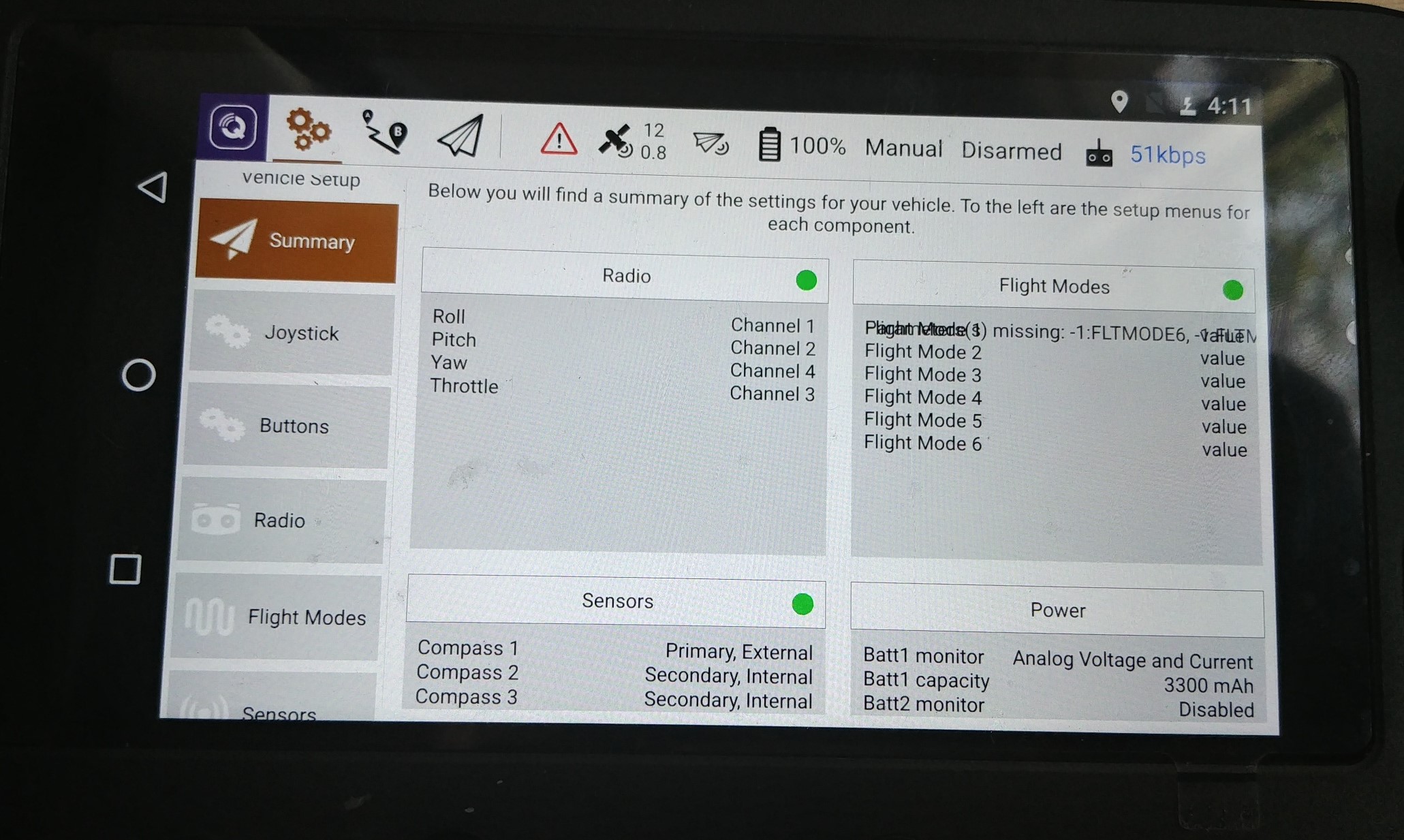
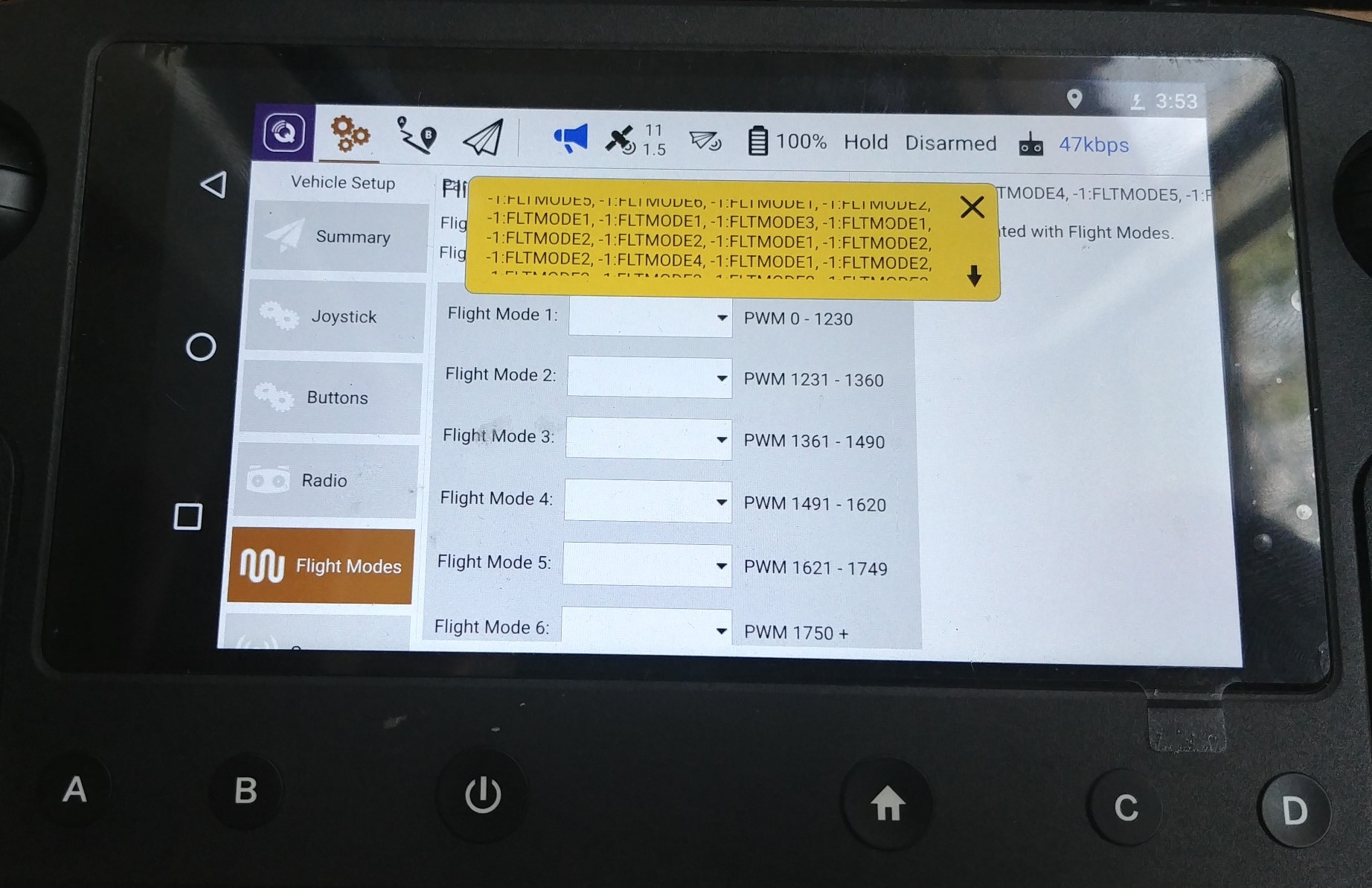
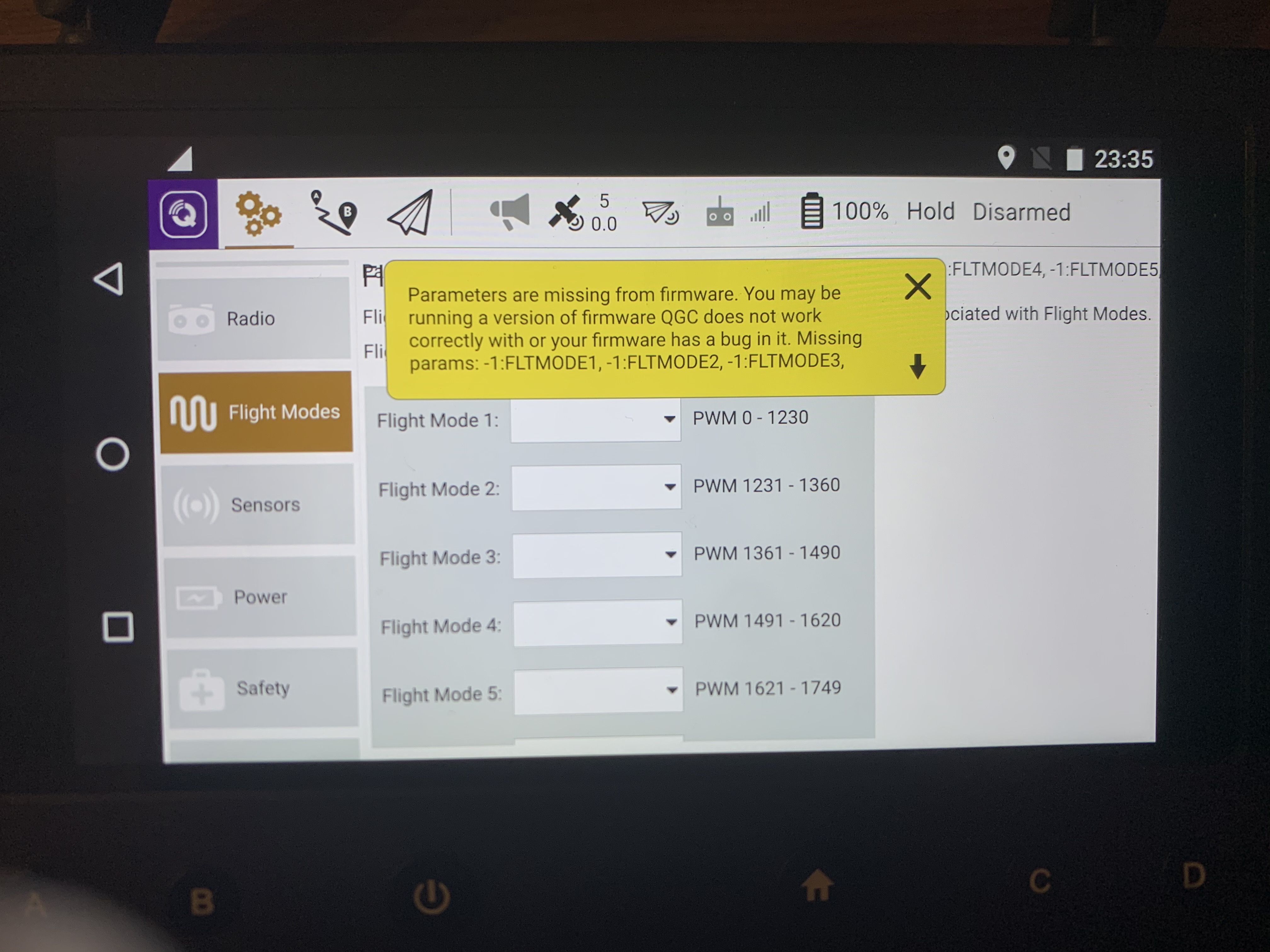
When I chcek the flight mode settings there is a yellow message:
“Parameters are missing from firmware. You may be running a version of firmware QGC does not work correctly with or you firmware has a bug in it. Missing params:
-1:FLTMODE6,-1:FLTMODE5,-1:FLTMODE4,-1:FLTMODE3,-1:FLTMODE2,-1:FLTMODE1”
The flight modes are set up correctly in Mission Planner, but do not show in Flight Modes setup on HereLink, also there is no way to assign flight modes in HereLink,
Is it the lack of compatibility with ArduRover or I missed something?
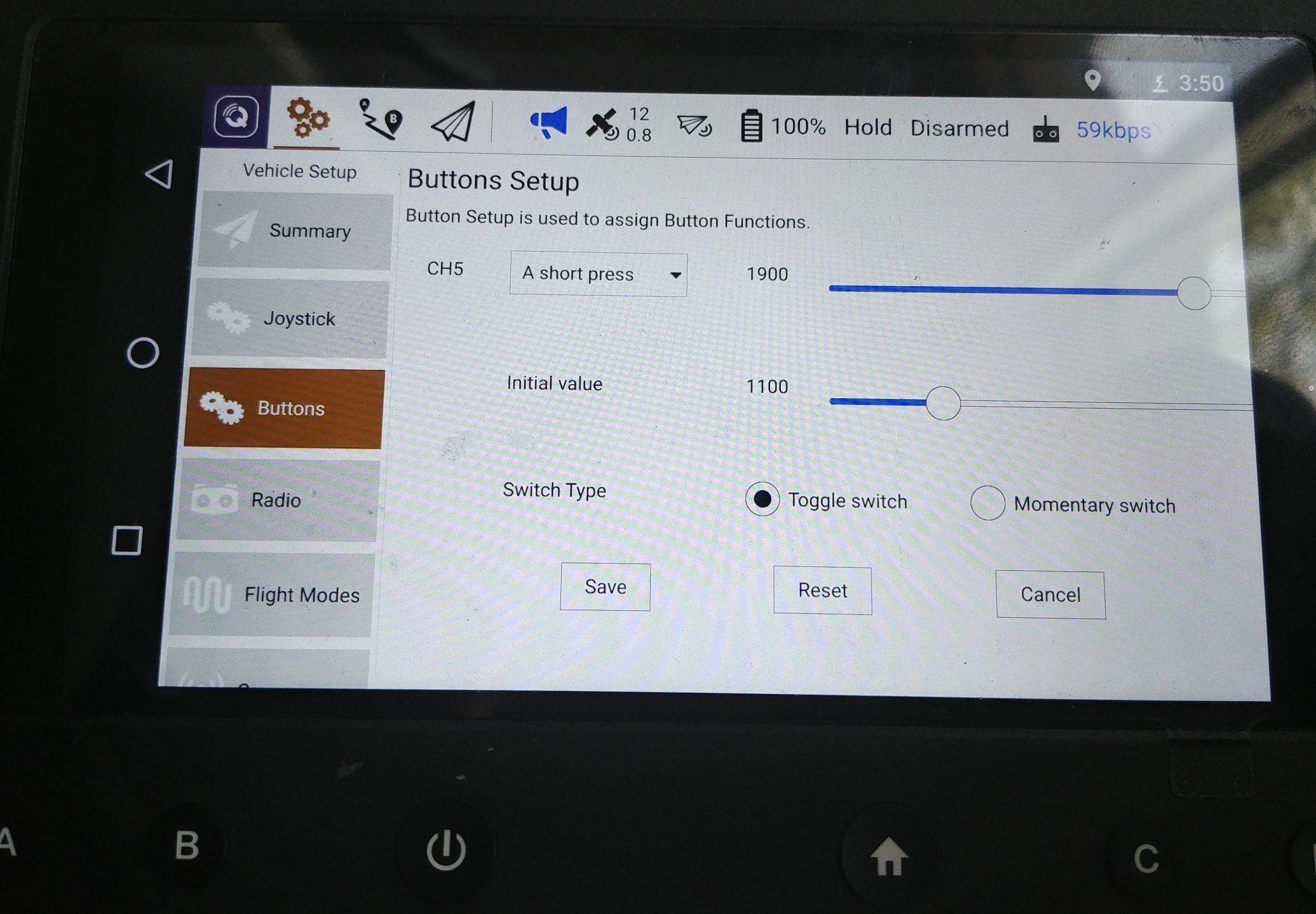
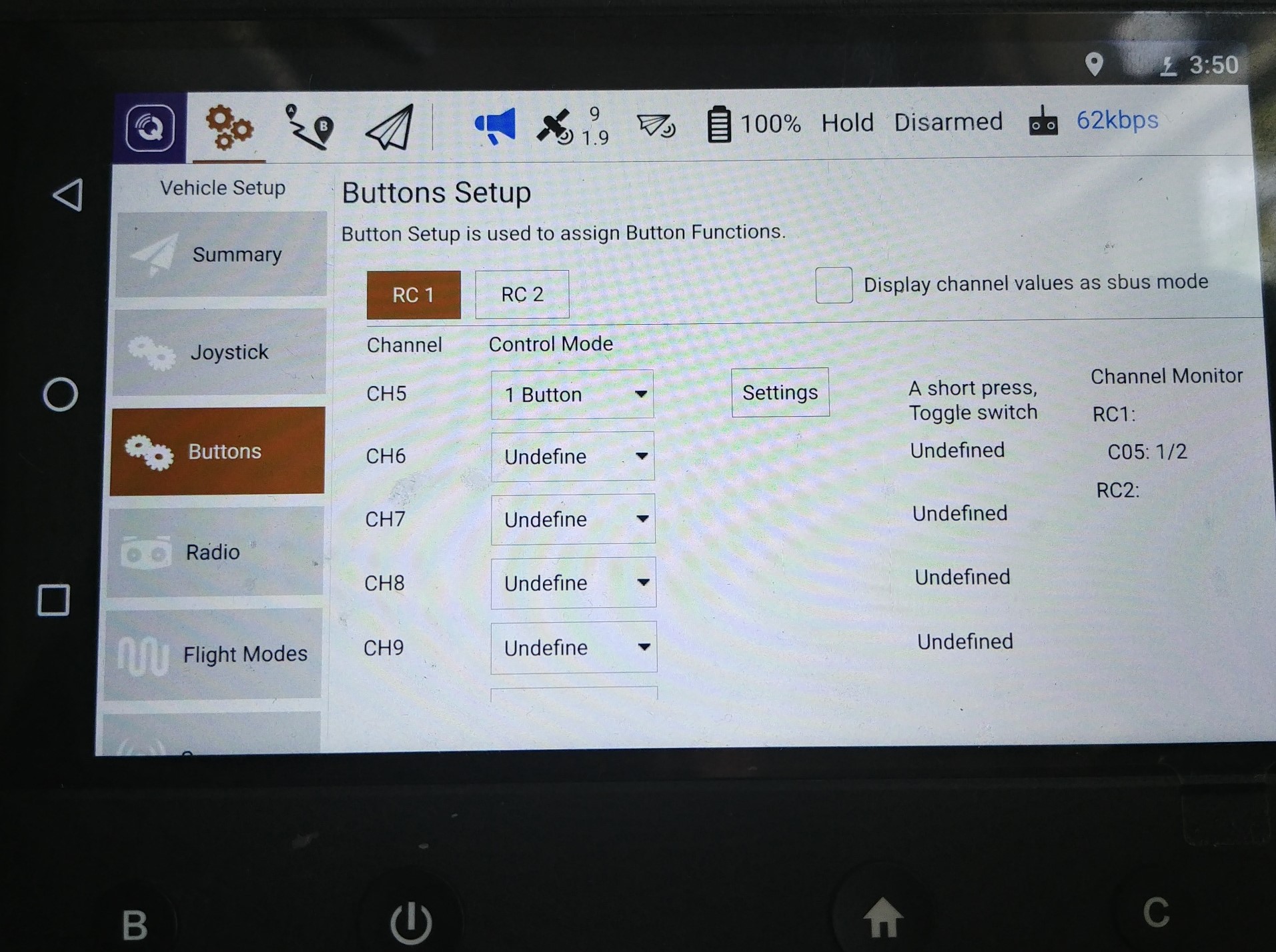
Hi, I assigned Flight mode change to chanell 5 and button A.
I did joystick calibration, radio calibration without problems.
But still can’t change Flight modes from HereLink nor from MissionPanner amd still can’t access the Flight Mode config screen on QGC.
Hi I the exact same issue as @m.gawel getting this annoying warning message at boot on my Herelink: “Parameters are missing from firmware. You may be running a version of firmware QGC does not work correctly with or you firmware has a bug in it. Missing params:
-1:FLTMODE6,-1:FLTMODE5,-1:FLTMODE4,-1:FLTMODE3,-1:FLTMODE2,-1:FLTMODE1”
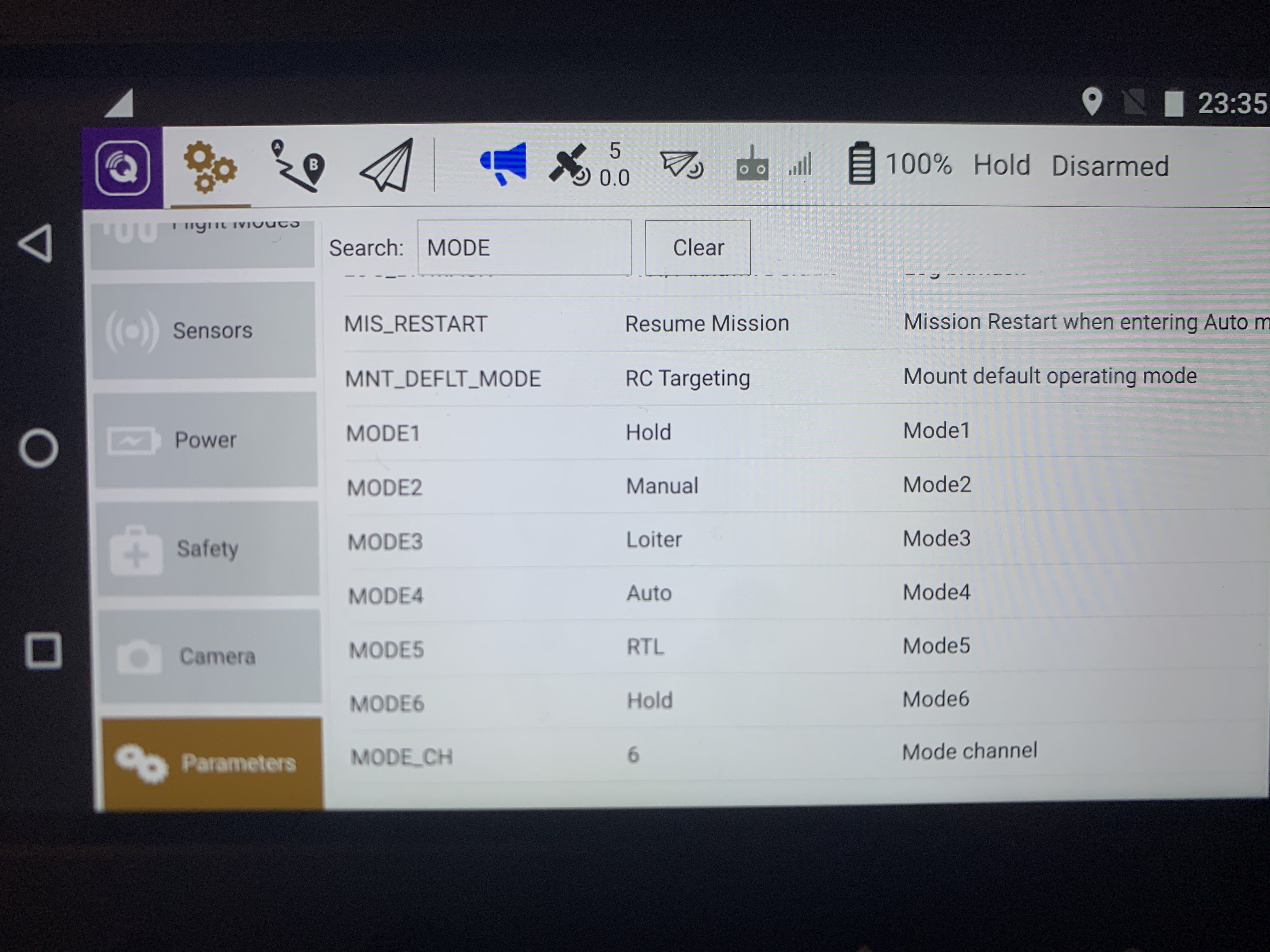
However my flight modes work. I have set up my desired modes for the buttons as displayed by the image. Those button settings also corresponds to my parameters which can also be seen in the attached images. I run the latest stable firmware on the herelink and ArduRover 4.0.0.