Hi,
I have a pretty dynamic stops of my quad when the flying speed is set down between two waypoints.
I tried Loit_brk_accell (from 250 to 75) and Loit_brk_jerk (750 from 1000) but i did not notice any smooting reaction.
The quad is still giving a kick to decrease the speed.
Is it possible to graduate this decceleration ?
here is a really low quality video but i think, it is enough to see what i 'am talking about.
Thanks.
A.
Alvin
August 27, 2020, 2:10am
2
Hi,
I understand i need to fine tune the copter and i will do a final autotune with this new payload.
My question was on the specific topic of decrease the speed between two waypoints. Have you any advice about this ?
Thnkns.
Adrien
Alvin
August 27, 2020, 9:23am
4
Anubis
August 27, 2020, 11:23pm
5
This is controlled by WPNAV_ACCEL parameter.
Anubis:
WPNAV_ACCEL
Thanks Anubis !
Is there any mean to clontrol the speed during the mission with stick control ? like giving pitch forward to speed up and pitch backward to speed down ?
Thanks
Adrien
Anubis
August 28, 2020, 5:32pm
7
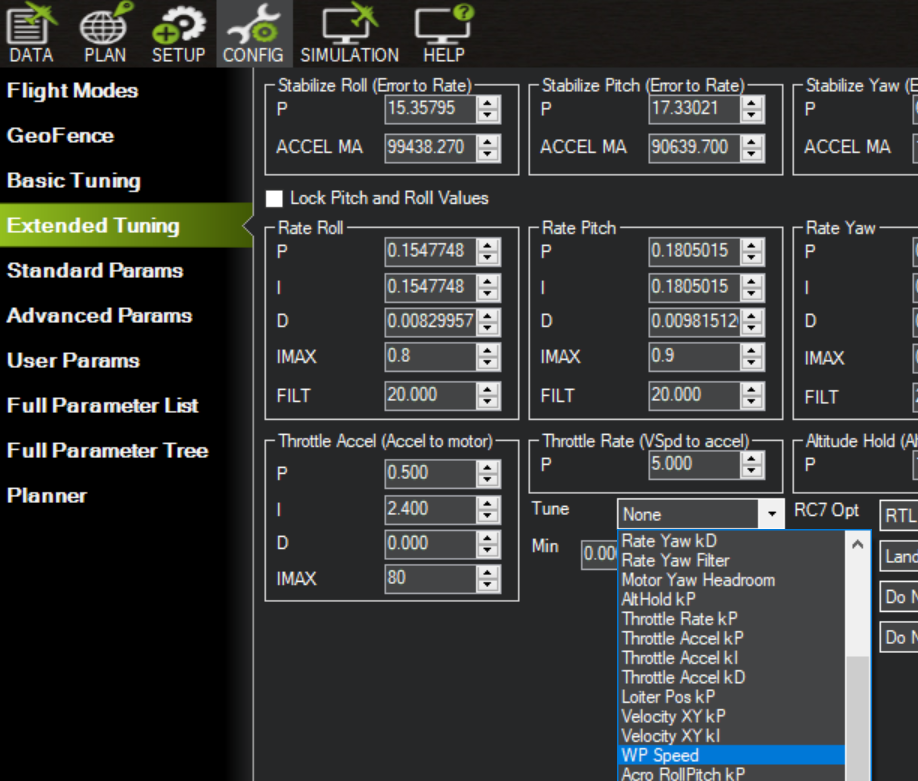
I’ve never done it before, but it looks like you can use the tuning knob to adjust waypoint speed in flight:
Interesting !
We use the Herelink remote, maybe i can assign the turning knob to this function. I’ll check this.