Looking good!
Couple of things from looking over the log:
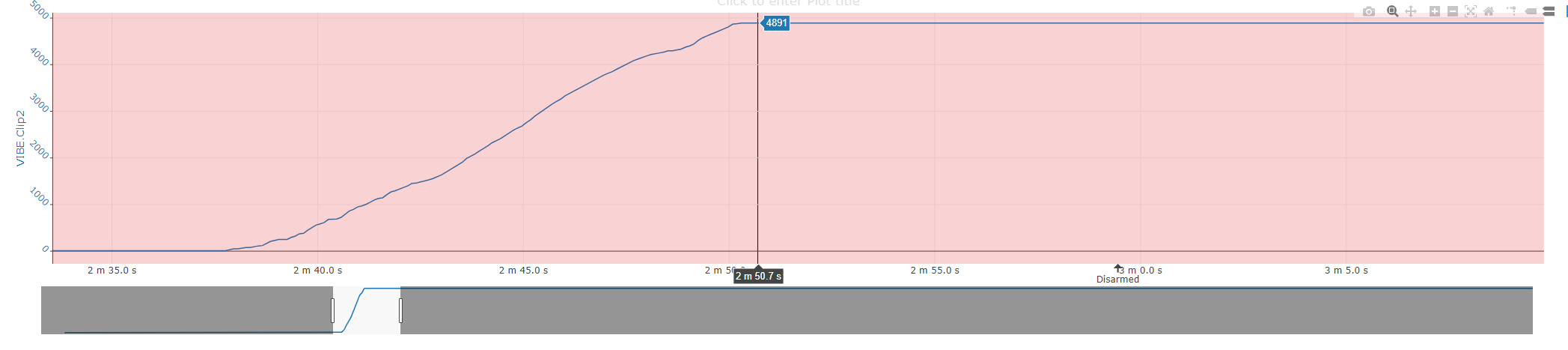
Your Z-axis vibrations are quite high, they regularly exceed 30 m/s/s which will cause problems. The clip parameter tells you how many times you hit the limits of the accelerometer (see documentation here). You hit almost 5000 clips during the flight, whereas an acceptable level is <100:
Look to see if there’s anything loose on the frame or if there’s anything flapping around near the flight controller. If everything else looks secure, you may need to use a vibration dampener. I had a similar issue and had to use a vibration dampener to get Z-axis vibrations down significantly.
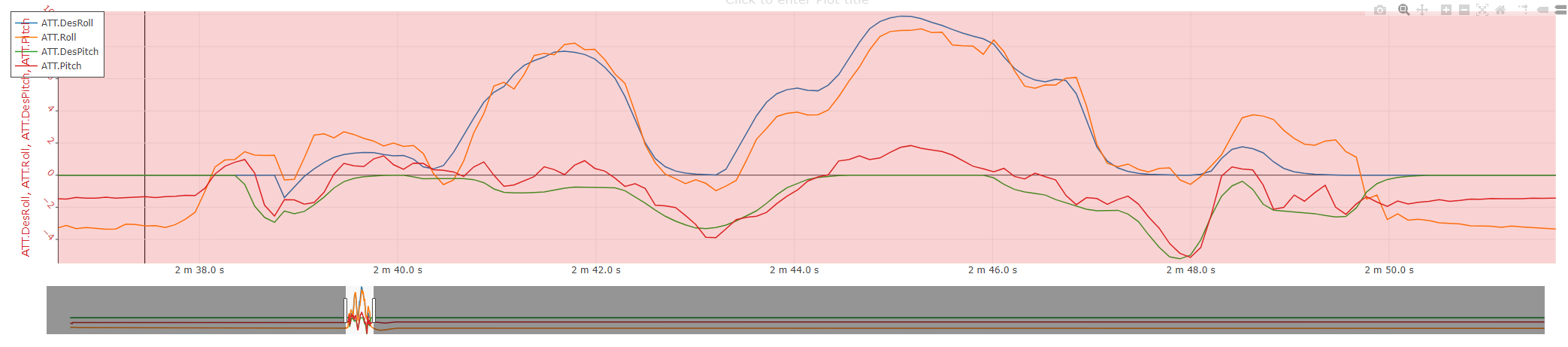
*Your PIDs are quite low. This is clear in your log as desired and actual pitch/roll have significant deviations:
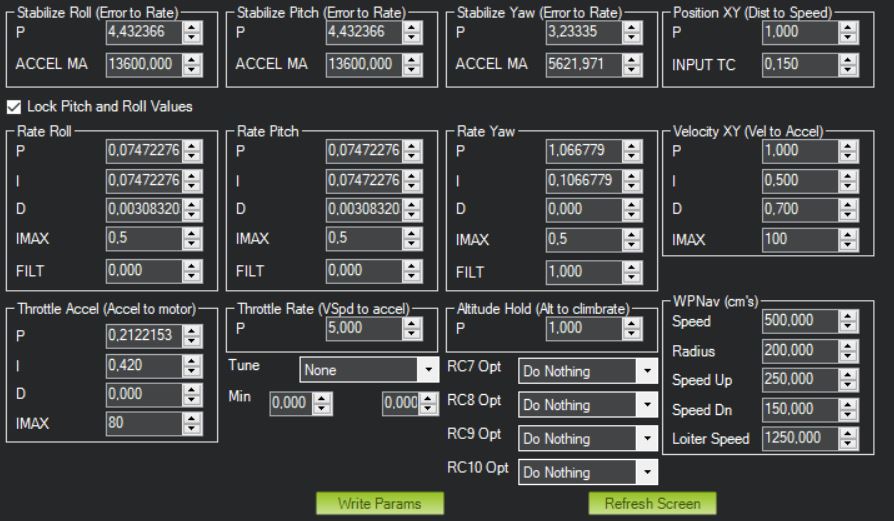
We have a Gryphon 1400 frame and our PIDs are quite a bit higher, with stabilise P around 6 for both roll and pitch and rate roll/pitch P around 0.21. Our tune is not perfect, still needs a bit of work but it flies okay-ish. We need to put it through another round of autotune to try and get it locked in.
I would recommend doing some more manual tuning and reducing the Z-axis vibration down to an acceptable level before attempting an autotune, otherwise you might get less than satisfactory results.
hello
i have tested my hexacopter 12s 22’’ for the first time and it flies so stable but i have problem in autotune when i finish it i don’t hear beeb that indicating autotune is finished can you guys help me out and maybe look at my logs and see what is wrong with it ? 2020-07-03 06-42-52.tlog (3.8 MB) logs log param
Could you attach the .bin file, the tlog/rlog files are recorded by the ground control station based on the data it received so they aren’t overly useful
It flies really well in Stabalize and AltHold, it feels reactive and stable.
However, the Loiter flight mode gives us some worries. No toilet bowl effect, solid position hold but flies less stable. It’s like its stands on a pole on its center point. It is balance really well but unstable, He is wiggling all the time.
We have also a loss of altitude when performing a translation.
Other point, i don’t know how to identify the differents compasses, i use three at the moment but i can’t select the one in the GPS ship b/c i don’t know which one is it.
The goal is to have this compass as the primary to avoid current flow to interfere.
Would you share how you were able to complete the autotune without having the battery drain as before?
I am facing a similar issue where the battery drains out while the autotune on one axis is not completed yet.
Hi,
i had this issue with our smaller drone, an X8, and our old 6s lipos. I managed to tune each axis one by one with the lipos charged at maximum. Some of them were more efficient than other.
Final autotune on 3 axis took less time to complete. That’s how it works for me.
We have an issue with vibrations on our quad. When flying, we can see the arms moving strongly and its causes vibrations alert on the flight controler. We also have some screws on the frame poping out.
Main screws are tight with threadlocker and don’t move at all.
The thing that ennoy us is that we are unable to identify the source of those vibrations. Props and motors are well balanced.
The perfect example is when i do direct ESC calibration, the signal does not pass through the pixhawk. Whatever the level of thrust, nothing at all moves, no vibrations.
Once the pixhawk reconnected, i get the vibrations you can see on the video.
Looks like the boom is twisting and bending because of how its area moment of inertia of cross-section is decided.
Make sure those arm joints are tightened enough and secured with a good adhesive. I earlier saw a picture where the boom had ripped off the aluminium joint.
And if it’s flame ESC, there are lot of things to take care of. Some have fixed PWM, and some don’t. Hope you have bench tested the motor and have right EXPO. Also check for noise on PWM line with a CRO.