Also, with that spreadsheet it’s easiest to highlight the parameters and values then:
Copy/Paste the calculated parameters and values into notepad++
Search, Replace
Select Search mode “Extended”
Find what: /t {tabs}
Replace with: , {commas}
Save As some_filename.param
Apply the new .param file using Mission Planner or similar - I find this quicker and easier than manually finding all the parameters and trying to set them without making mistakes.
I simplified and updated this spreadsheet for initial parameters, please download the new one and check it.
I’m going to be working on getting it into the Tuning wiki eventually.
I’m going to suggest to everyone to leave INS_GYRO_FILTER at default 20 instead of using the calculated value in the spreadsheet - UNLESS you’ve got a small frame, say 12inches or smaller, and in that case you will need the calculated higher value INS_GYRO_FILTER along with manual tuning and higher PIDs.
I’m not suggesting this is ideal for every combination - the idea is to create a fairly stable starting point where people can get their multirotors in the air and move on to Autotune.
I’ve updated the spreadsheet with this caveat - please download a new copy if you need to.
The spreadsheet works well in LibreOffice if you don’t have the Microsoft products.
Time flies fast but i managed to get things done !
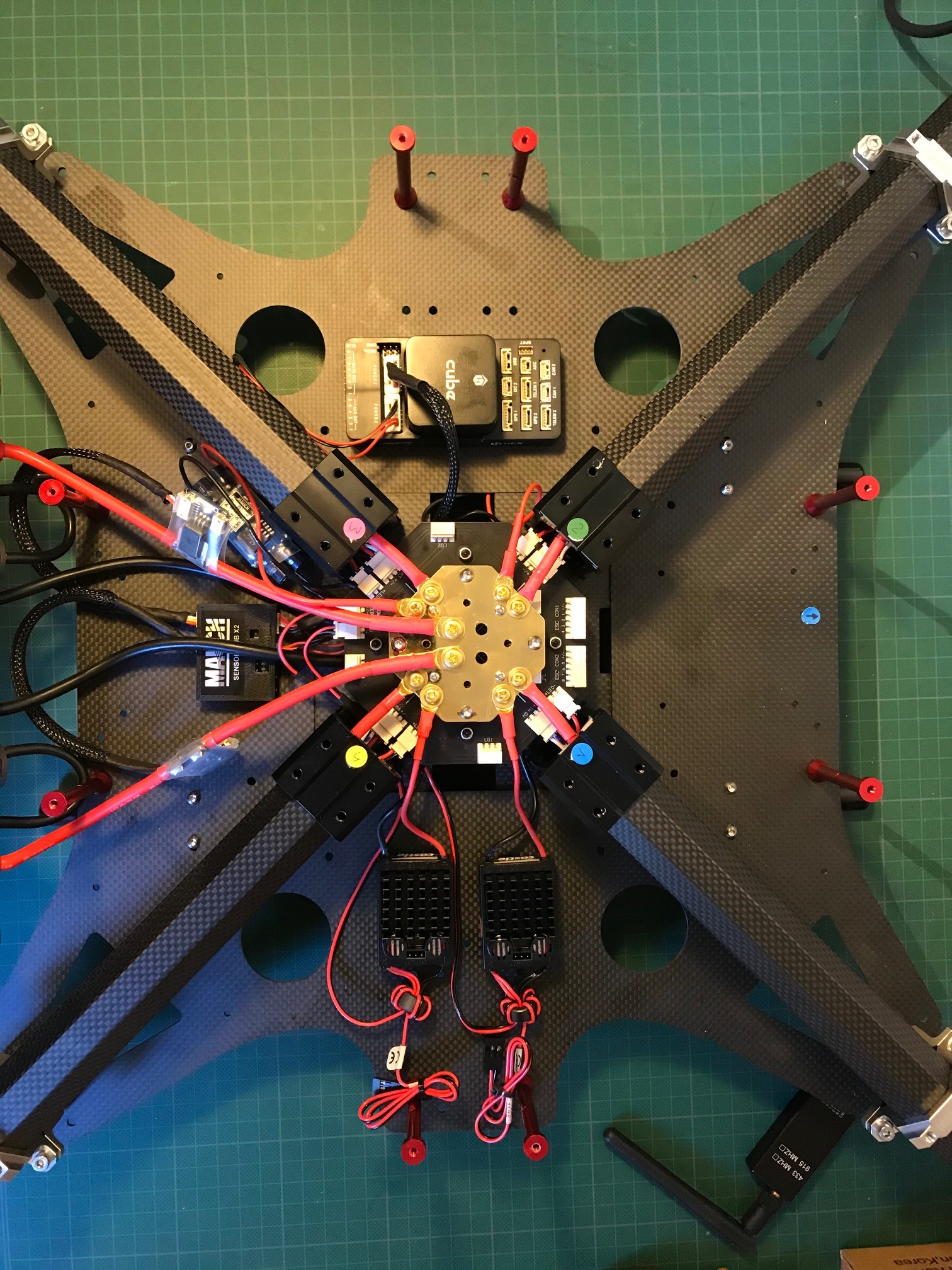
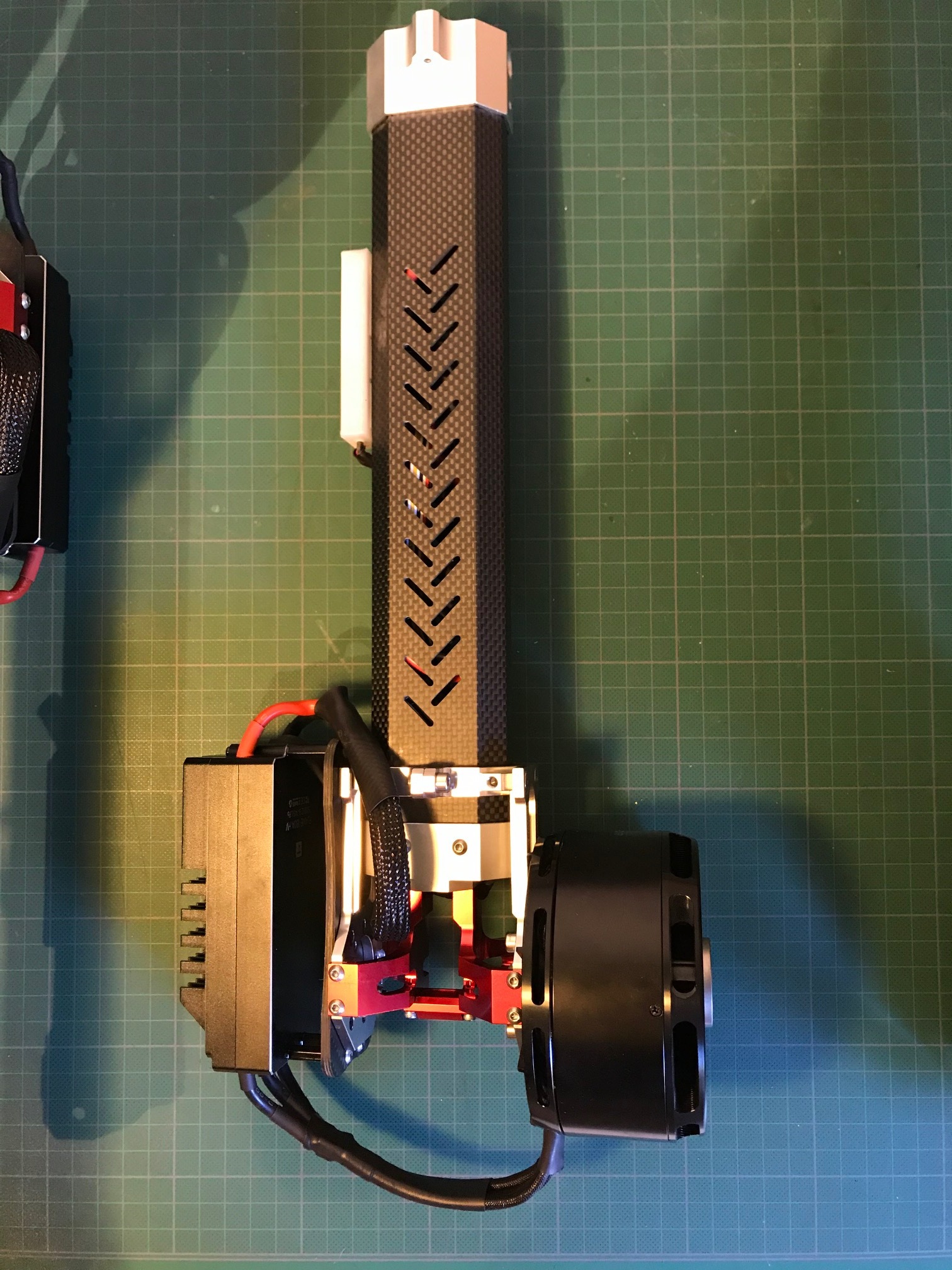
I finished the arm assembly and the main power distribution circuit. There some more equipment that need to be added but for the smoke test, it will do.
The Gryphon PDB isn’t has easy as i thought to use as the screws are weak and the use of thread locker makes mistakes painfull.
Dealing with tiny cable from MAUCH sensors was also tricky (my fingers’s fault) but the whole configuration is now neatly tight to the frame waiting for some current…
Pixhawk firmware is loaded, main security parameters are set, next step is checking ESC and motors configuration, RC link, telemetry settings and first heavy quad parameters settings.
Looks nice! I built similar size last year. Probably a bit bigger with 40" props. Make sure you have right gauge wires. Looks pretty neat. Make sure you have multimeter handy checking for continuity.
Looks really neat! Did you remove the wires from the connectors to get the cable braiding on? I’ve got a similar set up on order and will be building soon, and would like it to look neat like yours!
I have a problem wich seems to be common but i can’t find any solution so far.
My setup is wired and everything looks good but i cannot have my motor to idle. They are beeping continuesly like the normaly do beforei push the safety button.
i have an other machine with the cube and i did the same build and it is working properly.
I can see my RC inputs moving in MP as i move my rc sticks, the calibration is done, i can arm the motors but i get no signal from main outputs.
I spent hours reading posts about this without success.
Are you using Safety switch?
If no, Set BRD_SAFETYENABLE==0
**Make sure props are off.
If you still have problem, Set LOG_DISARMED==1 and share a log with video preferably.
I’am using the safety switch with no problem at all. I have the feeling that there is a voltage issue on the main outputs pins. What voltage should be measured here ?
I did a reset yesterday and today i have to set it up again and maybe swap with another pixhawk unit i know is working.
I did a reset of the board with minimal parameters. AND ! i modified my wiring on the Gryphon Super frame PDB.
It works perfectly as it should now !!!
The mistake was coming from the link between core PCB plug (label 1 & 2) and the signal 4 pin plug on the PDB (label 1234 and 5678).
However, i notice that motors are spinning with noise on certain speed or frequency. Like small scratch inside, not a well-oiled bearing noise. I invistagate this.
We didn’t fly yet, we have vibrations in the motors. I checked the building, made a all at once direct calibration of the ESC. No vibration at all in the motors if i pilot them directly trought the receiver, bypassing the pixhawk.
Back to the normal configuration, when i arm the motors trought the pixhawk, i have vibrations in the motors from 15% gaz. It gets better with higher throttle.
What would you think this comes from ?
Pixhawk CUBE, T-motor 180A ESCs, U13V2 motors, last firmware.