I calibrated everything on my Quadplane. But on my first takeoff I had a flip.
I posted a toppic with log here:
Few points I cant get my head arround, would appreciate some hints. Its probably all setup related:
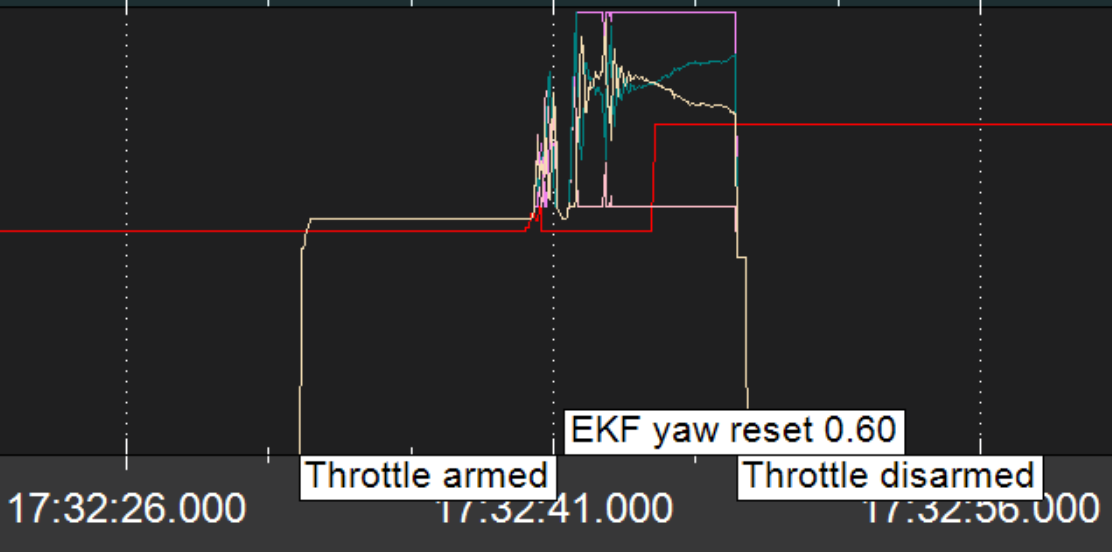
Situation with my throttle is: I need to hold it down to the minumum while arming, otherwise the motors spin up (thinkng about it I should probably use throttle arming). But the real problem is it seems QHover/alt hold takes throttle at minimum as altitude hold level. If I just raise my throttle a little to 1200, the copter wants to climb aggressively even though I am well below mid-stick.
In the Herelink I calibrated my throttle full range and left mid-stick at medium range. (“Full down stick is zero throttle”)
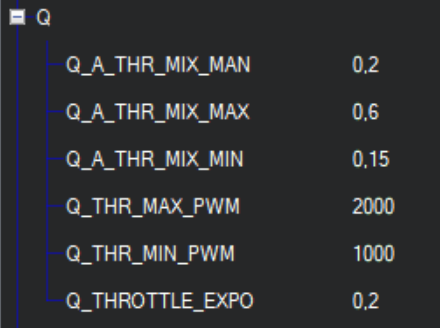
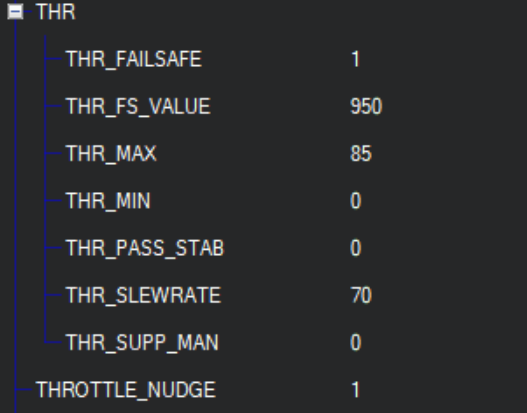
Here my throttle related configs in MP


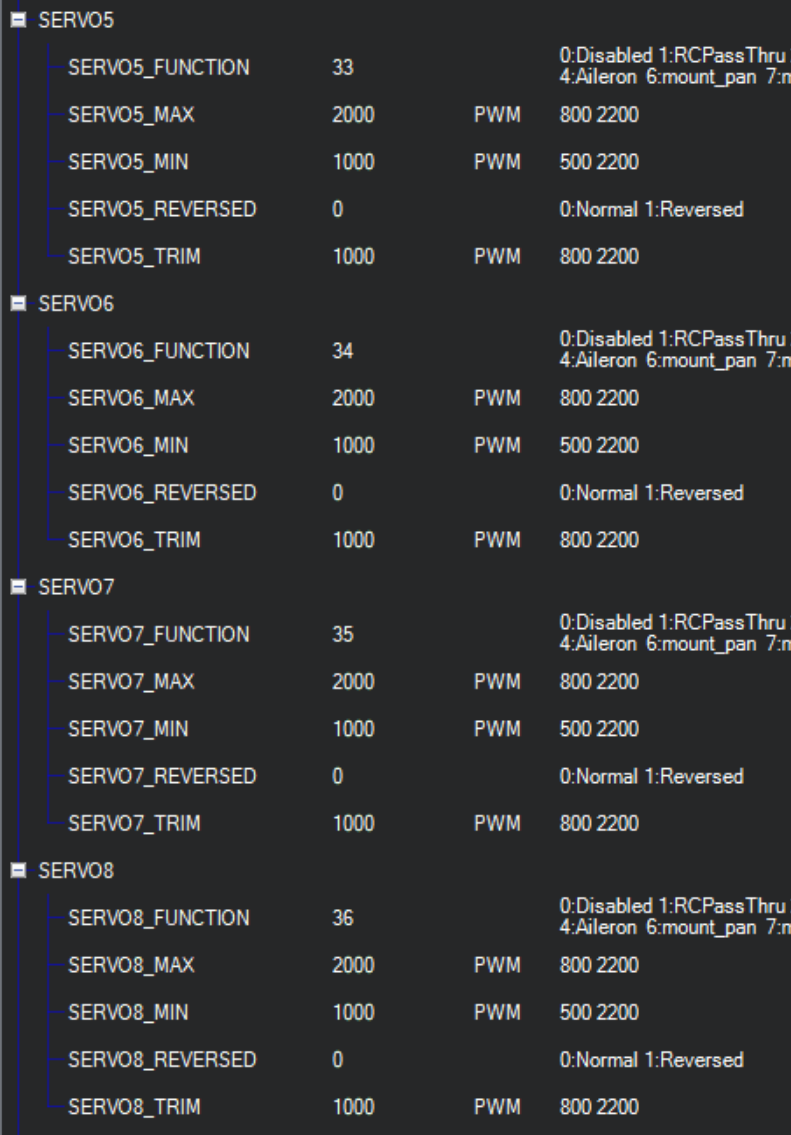
Just to be sure the Servo trims:
Would really appreciate a hint.