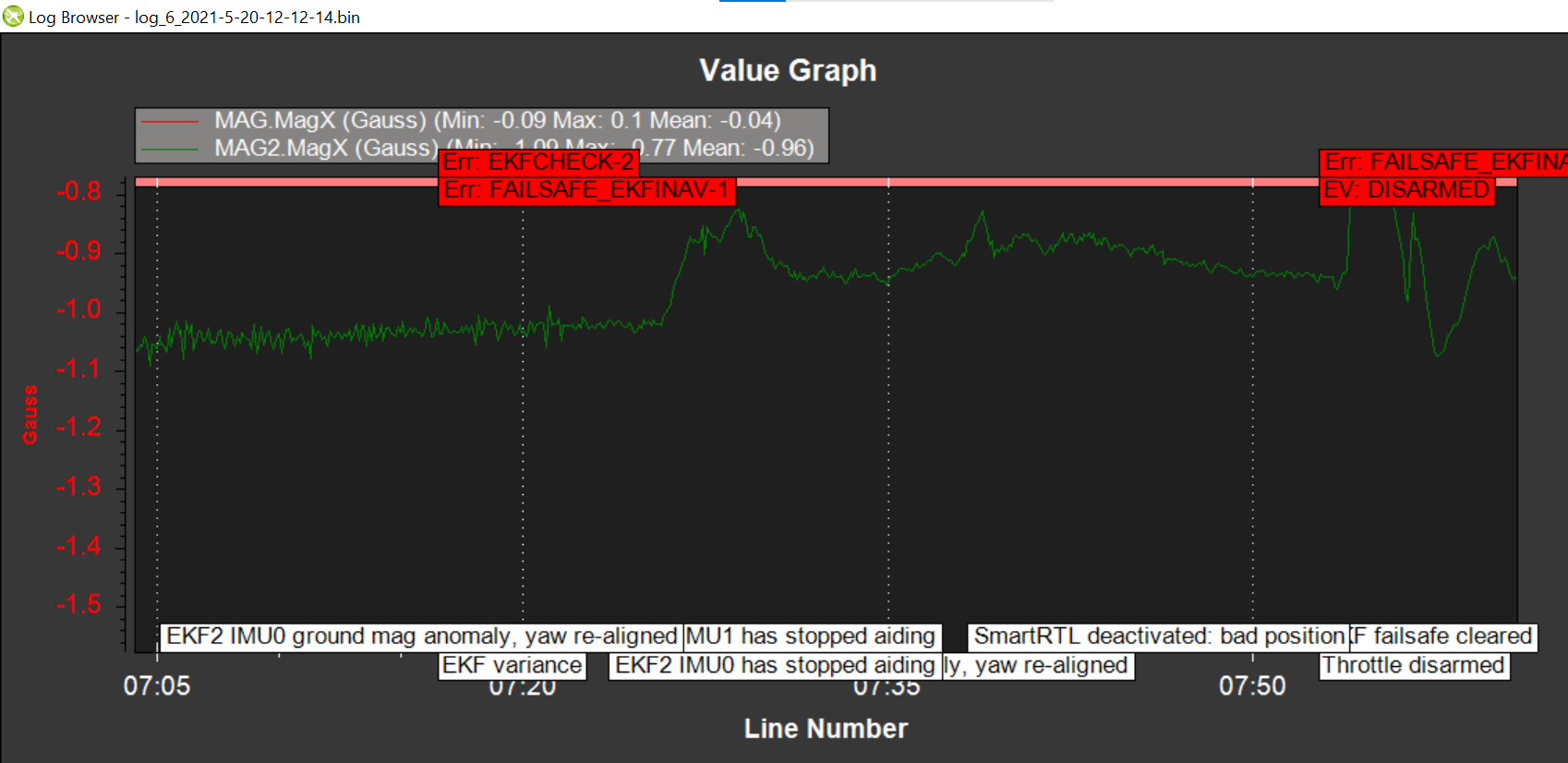
It looks like the mag was abnormal. This may make the rover unable to recognize its yaw position. Maybe this caused it walking to the side or shaking.
You may try to recalibrate the mag at the field, and calibrate after IMUs are warmed up.
For the MOT_PWM_TYPE problem, I think it determines whether motors can be reversed.
https://ardupilot.org/rover/docs/rover-motor-and-servo-configuration.html#motor-driver-types
https://ardupilot.org/rover/docs/parameters.html#mot-pwm-type
You will need to calibrate your RC every time after you have changed the setting, because the usage of PWM mid point would change.
For the GPS stopped working, you may try to connect external power to your GPS module. The port from Cube gives only a little power. It might be your GPS module didn’t get sufficient power.