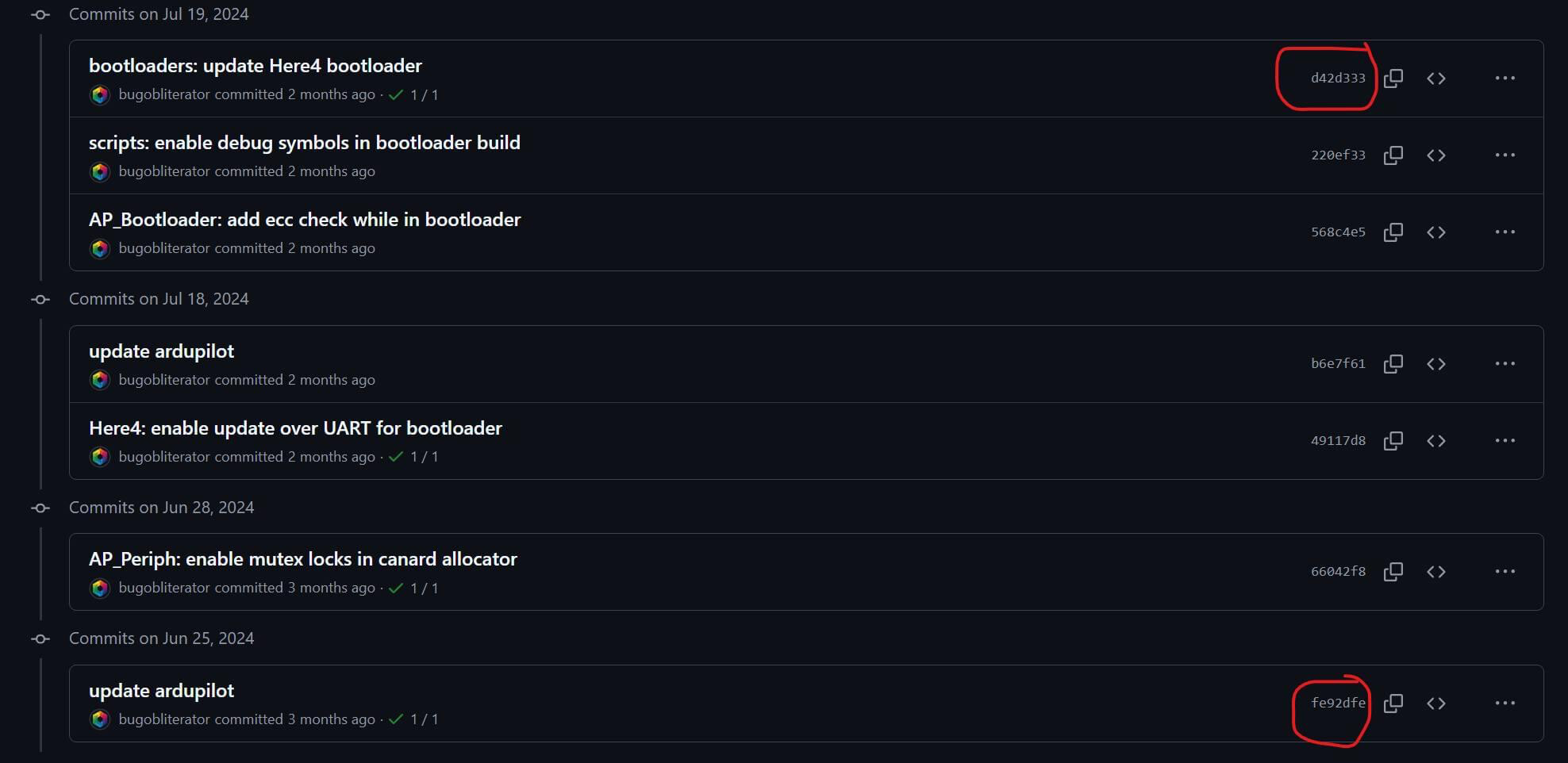
Edit 9th of July, 2024: All should please update your Here4 unit using Mission planner DroneCAN/UAVCAN panel, select download from the internet. Software Version should be 1.14.FE92DFEF or later. DO NOT UPDATE UBLOX FIRMWARE
This fixes an issue that can cause momentary loss of gps after 1 hour of use
Edit: 3rd of July: Flight status RESTORED. After much testing, it is confirmed that the failure mode is 100% predictable, and if it happens in flight, Ardupilot has no issues handling this. Testing with the here4 as a flight controller with no other assistance is underway, and we will update on the tests asap
Thanks to @sidbh and Paul Riseborough for their efforts in devising the tests to verify return to flight status.
This doesn’t mean your mag will not fail, but it does mean that if it happens in flight, it by itself will not be the cause of an accident.
Maybe there should be a public notice that needs to be put on ardupilot and PX4 about RM3100 issues? People should be aware of these failures. I imagine more people use RM3100 from more different brands.
I made no such statement and will not make such a statement, please don’t read more into or out of anything that I have said other than what I have written.
It is an assumption of yours to extrapolate from what I have posted to your statements.
All I am saying at the moment is that if the magnetometer fails, it will not lead to a crash, there is no risk to flight.
You need to understand what I’m trying to say too. It’s either RM3100 issue or design issue or software bug. Your reasoning doesn’t make sense without mentioning what the actual problem is.
I have posted the facts, that’s what a safety bulletin is for.
point 1. There is a risk of failure of any and all sensors, regardless of manufacturer, or type… we recommend… and always have… to HAVE A BACKUP…
point 2. We are very confident that ARDUPILOT will handle a failure of a magnetometer sensor extremely well.
point 3. the actual exact nature of the problem is STILL UNDER INVESTIGATION, but it is NOT a PCB design issue nor is it a testing or firmware issue.
Point 4. point three implies NOTHING other than the facts stated in point 3.
Point 5. the failure rate is miniscule, of all units made, less than 0.001% have failed, and ZERO have caused a crash.
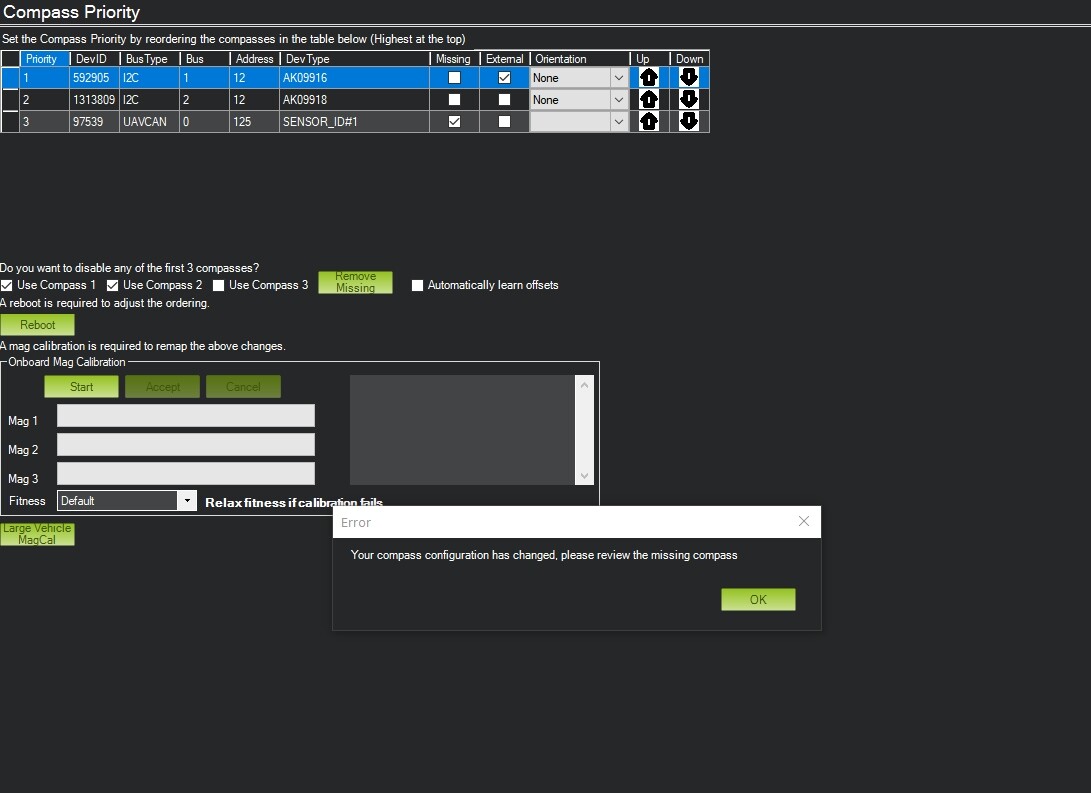
Point 6. during the investigation, an unrelated bug was fixed that causes a time wrap at 1 hour after power on. update your here4 on mission planner to latest… Always stay up to date. DO NOT UPDATE the ublox firmware on Here4, or you will lose moving baseline, and it is NOT recoverable.
Point 7. We did not hesitate to ground all units while we investigate the safety implications of the potential issue.
Point 8. I only deal in facts. no further speculation will be entered into.
We are unable to update our Here4 GPSs to the required version. The Mission Planner update completes, but the only brings us to version 1.14.D42… and not 1.14.FE9. We tried to use the beta update option however it does not pull down any firmware. Are the firmware files available for download anywhere?
The numbers you are stating are all over the place. Previously you mentioned 0.1% failures, now the decimals have moved.
All I’m trying to say is to have a similar notice across ardupilot and PX4 so people are aware of failures. I have seen lot of RM3100 being used lately. I want community to know and understand failure modes. Maybe there are better compass than RM3100 people could look for.