Check the wiring of S-Bus cable to pixhawk. The yellow cable is connected to the top pin and black cable to the bottom. I think the marking behind the pixhawk mini carrier board which I had was wrong.
I couldn’t detect radio channels and even QGC will say radio calibration issues and buttons not mapped.
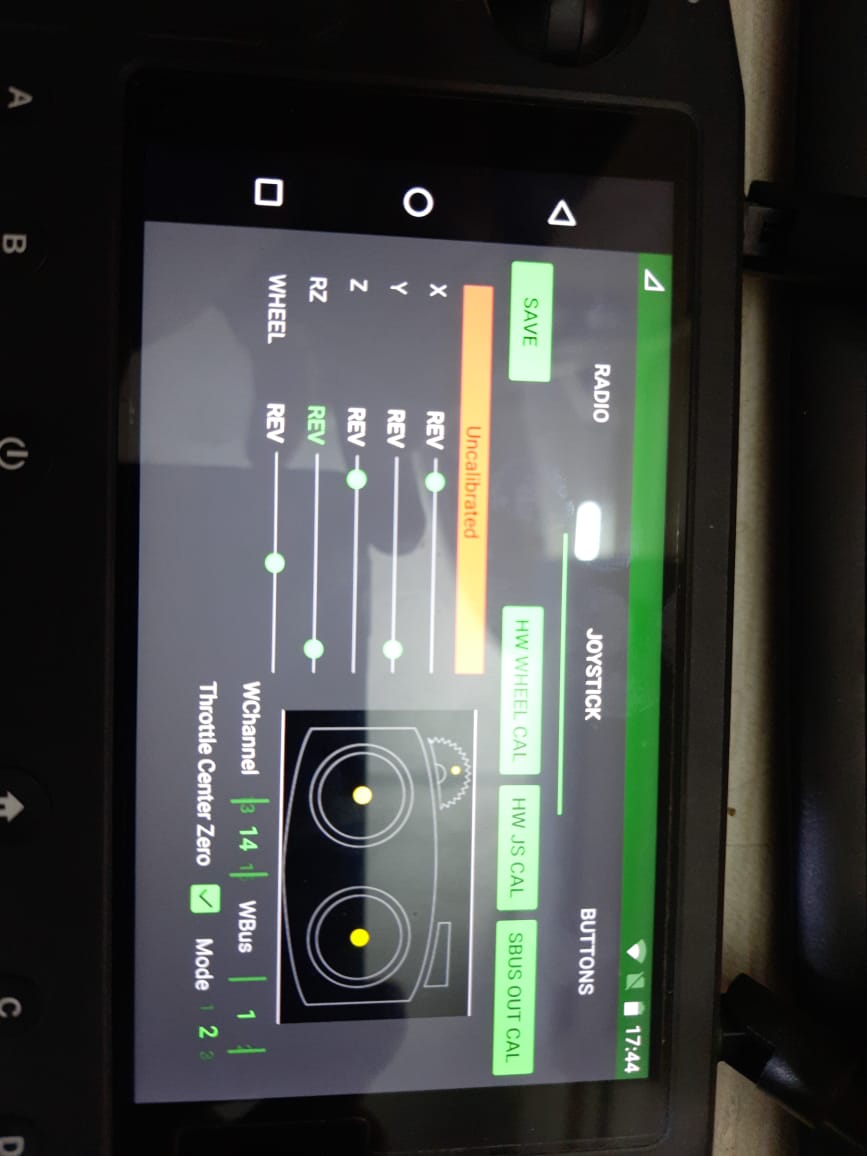
You need to click HW JS calibration. Then follow that then do the wheel and you must click save once done.
Please follow the instructions on docs.cubepilot.org for this.
thanks for solution but after update i’m facing another problem i.e. missing params:1:compass_primary
There has been changes to the whole compass setup in Ardupilot. I would set that element up in mission planner and ignore the messages in QGC as this will be fixed in future updates.
what is reason for ekf variance
having problem like ekf variance and compass_mot2_z

Can you try to calibrate in Mission Planner and see if this message will still pop up?
we can’nt calibrate rc with mission planner,is that possible?
since drone is not hovering at zero throttle.
Herelink uses sbus for remote control, therefore you can calibrate RC in Mission Planner
Hovering at zero throttle or not has nothing to do with able to calibrate in MP or not.
HOW tO ASSIGN BUTTONS A,B,C & D FOR DIFFERENT FLIGHT MODES IN ORDER TO ASSIGN THEM AUTO,LOITER ,ETC not able to assign
If you uses SBUS button,
assign the buttons to a sbus channel. Then go to your ground control station and allocate the rc channel for changing flight mode.
If you uses mavlink button,
go to Solex and assign buttons there
thanks
facing new problem, although my 4 motors are working properly, but after esc calibration only 2 motors are rotating.
done esc calibration 2-3 times but facing this problem every time
You may go to the Motor test page on Mission Planner to see if the PWM signals output are working.