Still having issues with Aggressive takeoff in auto takeoff mode. I have tried all the recommendations in the discussion, but I still experience the same problem. Any help is greatly appreciated.
What suggestions did you try? Have you got a link to the discussion?
What sort of vehicle is this and can you provide a link to a .bin log please.
We need more information to make any assessment.
If this is regarding Copter, then takeoff hasnt really changed for a long time, except there’s now parameters to make takeoff less aggressive if required.
The log file is too big to upload.
I changed the
TKOFF_SLEW_TIME
TKOFF_THR_MAX
MOT_SPOOL_TIME = 3
OK, thanks so far.
You can upload the .bin log to a filesharing service like Dropbox or similar, then share the link here.
Please also describe the copter, like takeoff weight, motors, props, batteries…
What ESCs do you have?
What props and motors?
Start with these for now, but they may not necessarily fix your problem yet:
ATC_SLEW_YAW,40
ATC_THR_MIX_MAN,0.5
ATC_THR_MIX_MAX,0.5
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
FENCE_ENABLE,1
GPS_AUTO_CONFIG,2
GPS_GNSS_MODE,67
INS_HNTCH_ENABLE,0
INS_LOG_BAT_MASK,0
PILOT_THR_BHV,7
PILOT_TKOFF_ALT,200
PILOT_Y_EXPO,0.3
PILOT_Y_RATE,60
PSC_ACCZ_I,0.6
PSC_ACCZ_P,0.3
PSC_POSZ_P,1
TKOFF_THR_MAX,0.7
WP_NAVALT_MIN,2
You dont need the harmonic notch filter since there is very low noise, but it wasnt working due to incomplete settings anyway.
Also apply this magfit param file - the compass cal wasn’t very bad but this should really fix it up.
MAGFit_camflite.zip (451 Bytes)
Download and unzip, then apply via MissionPlanner full parameter list, “Load from file”
Don’t rush out and try another flight though - let me know those other details and then I’ll have a couple more steps for you to do.
1 Like
Thank you so much! I’m using a HW x6 plus 150kv 24" props
OK, I’m going to assume this is the PWM version and not the CAN version of those motors.
Set these first:
MOT_PWM_MIN,1050
MOT_PWM_MAX,1950
MOT_THST_EXPO,0.74
Now reboot the flight controller then go to the MissionPlanner motor test.
- Find the lowest percentage (value) that will reliably startup all motors at once.
- It should be around 0.11 or 0.12, somewhere in that region, maybe lower.
- Set that value as
MOT_SPIN_ARM - Now add about 0.03 to that value, for example it may equal 0.15, and set that new value as
MOT_SPIN_MIN
You may need to provide a little load on the motors by letting a couple of fingers rub against the bell to simulate the load of a prop being fitted.
While you are there and connected up to MissionPlanner get a spirit level and pack under the landing gear to get the motor-to-motor spans all as level as possible.
So you are not levelling the flight controller, you are levelling the “prop disc”.
Now press “Calibrate Level” in the Setup / Mandatory / Accel section.
Now go and try a flight - start in Stabilise if you can, or AltHold.
The copter should try to positively launch and climb to 2meters, but it shouldnt be like a racing quad shooting for the moon.
I provided settings for this because big copters have a habit of trying to move laterally (because of wandering GPS position), snag the landing gear in the grass and tip over, or sometimes causing the copter to violently correct and fly straight for the pilots head or nearest vehicle. Not cool with big carbon fibre props ![]()
GNSS signal is most unreliable when the receiver is close to the ground, thus making the most dangerous stage of flight even more risky.
All the settings I’ve provided are based on what’s in your log and existing settings, so be sure to apply everything I’ve provided at once.
One of the settings better suits your transmitter, “Throttle from mid-stick”, and it better suits multirotors in general. The behaviour may not be noticeably different but more technically correct.
Please provide your feedback and observations plus the new log.
We can check it and there may need to be more adjustments.
1 Like
Here is the log. I need to retune it. I took off in lotier, but I’m going to go back out and take off in stabilized. However, there was a lot of vibration, and I didn’t have my laptop with me to make any adjustments.
Set these and retest:
ATC_ANG_PIT_P,4.5
ATC_ANG_RLL_P,4.5
ATC_RAT_PIT_D,0.006
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_P,0.12
ATC_RAT_RLL_D,0.006
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_P,0.12
ATC_RAT_YAW_I,0.055
BATT_FS_CRT_ACT,1
Those ATC_RAT I terms are almost always equal to the P terms. There’s no need to have them different (like BetaFlight for example) without very specialised requirements and tuning.
If those new settings dont help the oscillations, we will step through using the VTOL QuickTune script. That will get it stable.
Same problem.
Try these next
ATC_RAT_PIT_I,0.15
ATC_RAT_PIT_P,0.15
ATC_RAT_RLL_I,0.15
ATC_RAT_RLL_P,0.15
ATC_RAT_PIT_SMAX,50
ATC_RAT_RLL_SMAX,50
ATC_RAT_YAW_SMAX,50
Did you try that procedure to pack under the landing gear to level the whole copter and do “Calibrate Level” ? This can help quite a bit too.
Use Stabilise or AltHold to takeoff, land immediately if there’s issues. If so reduce all those 0.15 values to 0.14
The SMAX values can be left in place and wont cause any issues.
Yes I got it perfectly level.
Here are fresh new flights that reset everything. The last flight I was doing was an autotune, but I ran out of daylight.
The issue with the z was PSC_POSZ_P and PSC_VELZ_P
I updated the log with a good flight. Let me know what you think.
Thank YOU
Attitude control looks quite good.
I can see altitude control is a little off, mostly that will be the ACCZ param listed below.
ARMING_CHECK,1 (features not in use are ignored)
ATC_THR_MIX_MAN,0.5
BATT_FS_CRT_ACT,1
GPS_GNSS_MODE,7
PSC_ACCZ_I,0.4
You will need to set these to finish setting up the harmonic notch filter properly:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
LOG_BITMASK,180222
I think you can adjust (upwards) TKOFF_SLEW_TIME to tame the aggressiveness of the takeoff now. The default is 2 which is normally fine, but try 3.
Here is the flight log with your changes - https://www.dropbox.com/scl/fi/olsvshwcinhpo9s5978eq/log_17_2025-5-4-11-47-58.bin?rlkey=d5ojkmdqg7m6gbkyysp9t9gko&st=u1s53bze&dl=0
Hi Paul,
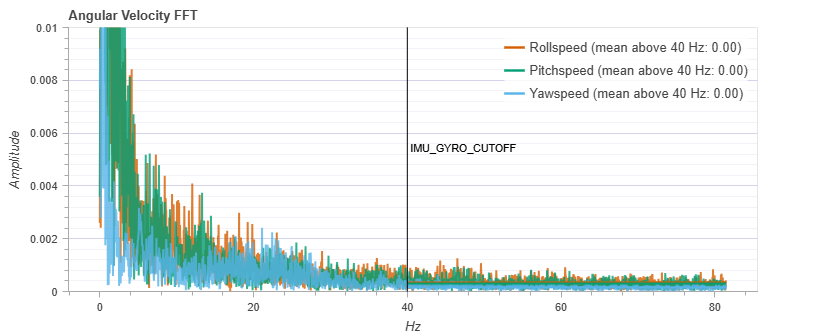
I’m really not sure what to make of those graphs - they seem to be indicating very low levels of noise. It probably depends a lot on what you are trying to find.
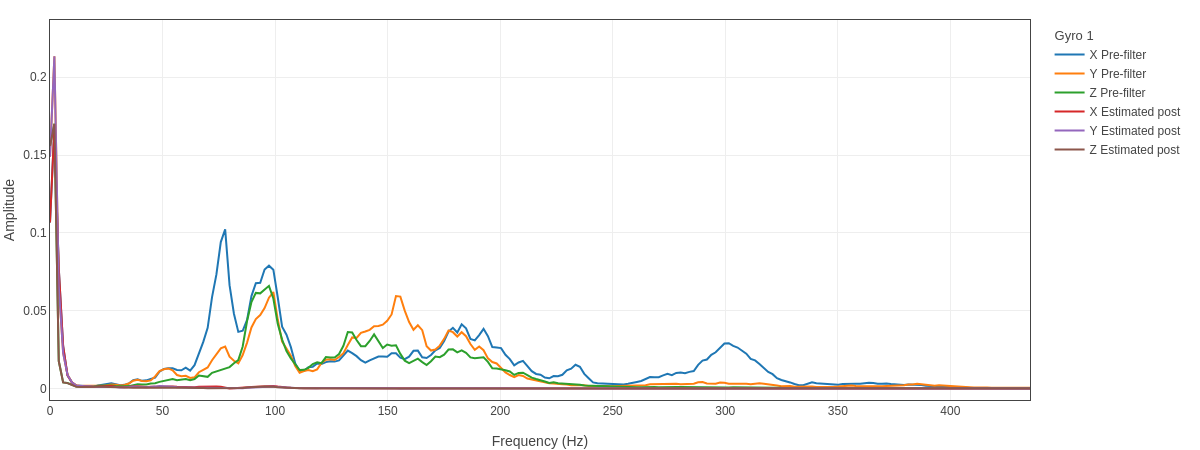
You can definitely disable the notch filter entirely. There is practically no noise getting past the gyro filter.
In this graph the pre-filter noise only needs any treatment IF it gets through to post-filter. With the harmonic notch filter “less is more” and we should not use any more filtering or features than absolutely necessary.
You should set these:
INS_HNTCH_ENABLE,0
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
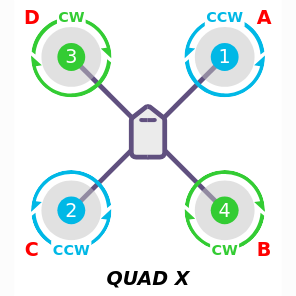
I think the problem causing that spread of noise (instead of distinct peaks) and the altitude issues is probably some frame twist or motor mount twist. The CCW motors are working slightly harder than the CW motors to correct for some physical yaw bias.
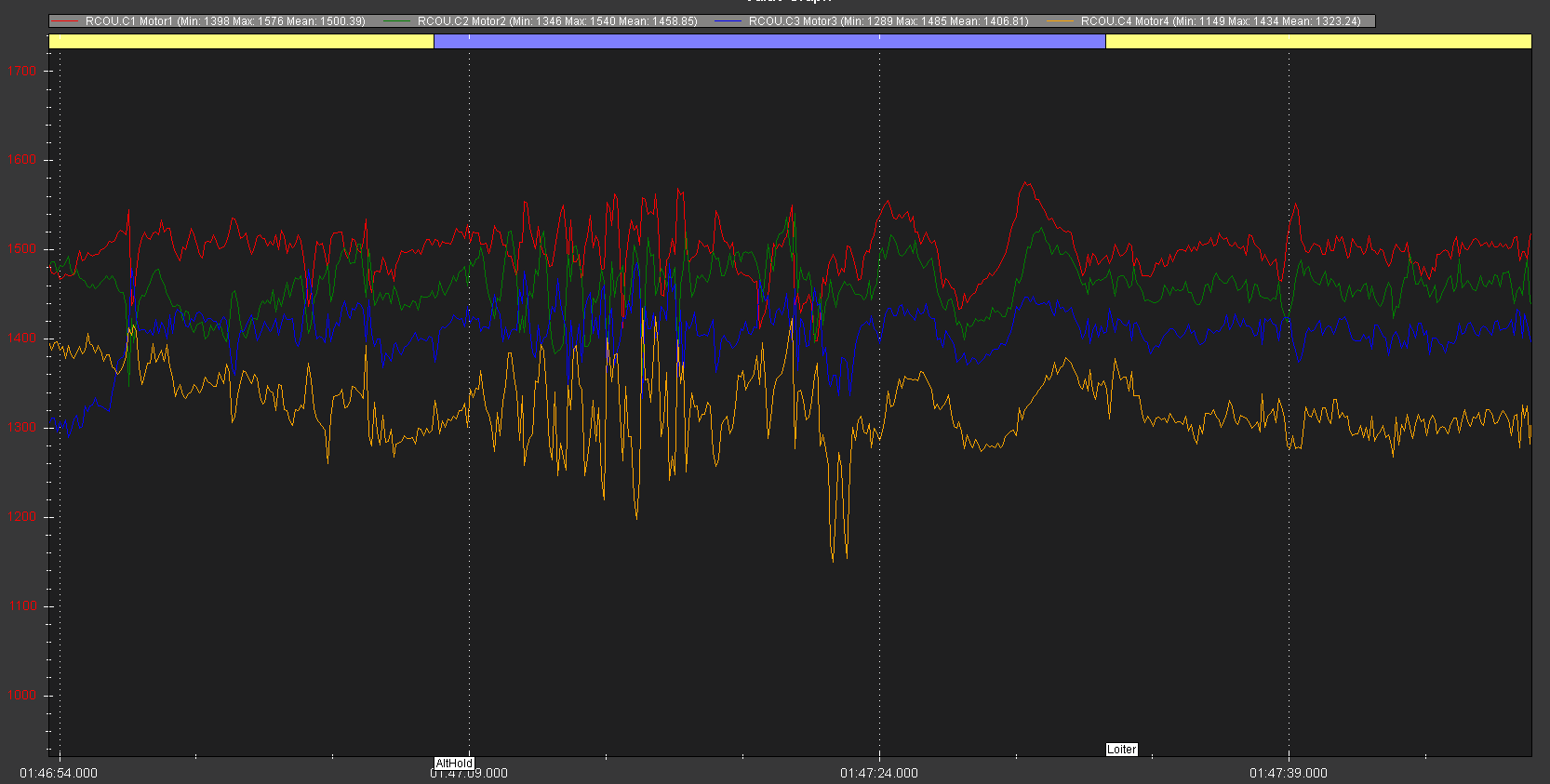
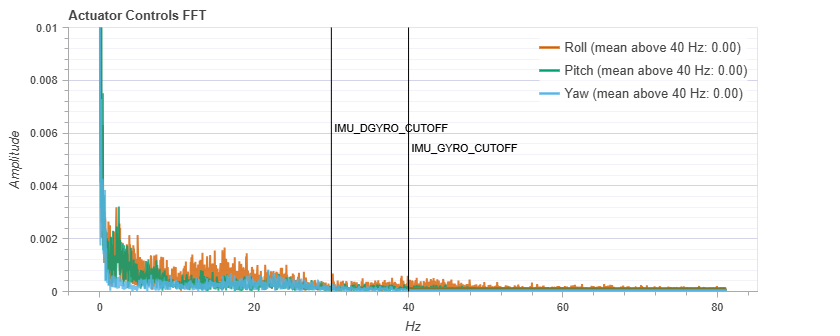
It looks like a section of oscillating outputs in AltHold in this graph, however that is commanded pitch and roll - so that’s nothing to worry about.
Since attitude control is actually quite good regardless of the spread of motor outputs, I’m certain that fixing that motor mount twist will make good progress to fixing the altitude issue too. If you can nail that down Autotune of all axis’ would make good improvements.
You can set PSC_ACCZ_P,0.2 and that will help out the altitude issue once the motor outputs are pulled into line and motors stop fighting each other.
In other news, try GPS_AUTO_CONFIG,2 to get the GPS update rate more stable. It’s already doing better by selecting less constellations than earlier. There is a nice stable HDOP.
It’s important to have BATT_FS_CRT_ACT,1 since once the battery reaches the LOW level it already starts doing RTL, and when reaching critical level triggering (or continuing) RTL is not helpful since the battery is now at a stage where the copter needs to save itself. I mention it repeatedly because I’ve seen multiple crashes because of this simple setting - that and messing with the voltage levels to try and get an extra few seconds flight time. I’m glad to see you have all the correct voltage levels set.
Overall this is getting very close to being just right.
In this comment, “I think the problem causing that spread of noise (instead of distinct peaks) and the altitude issues is probably some frame twist or motor mount twist.” The airframe is rigid, with no twisting, but I have 2.5-3 degrees of motor twist.
The CCW motors have -3.0deg and CW are + 3.0 deg. maybe that is way to much?
Thank you for your input again. I will make those changes and test fly again. I will post the logs asap. If you see my other post, I wonder if my motor angle is too much or in the wrong direction… good observation.