Oh yeah, prop guards might be useless if they are already flimsy. Anything that moves, shakes or vibrates is bad.
You did well fixing the vibrations.
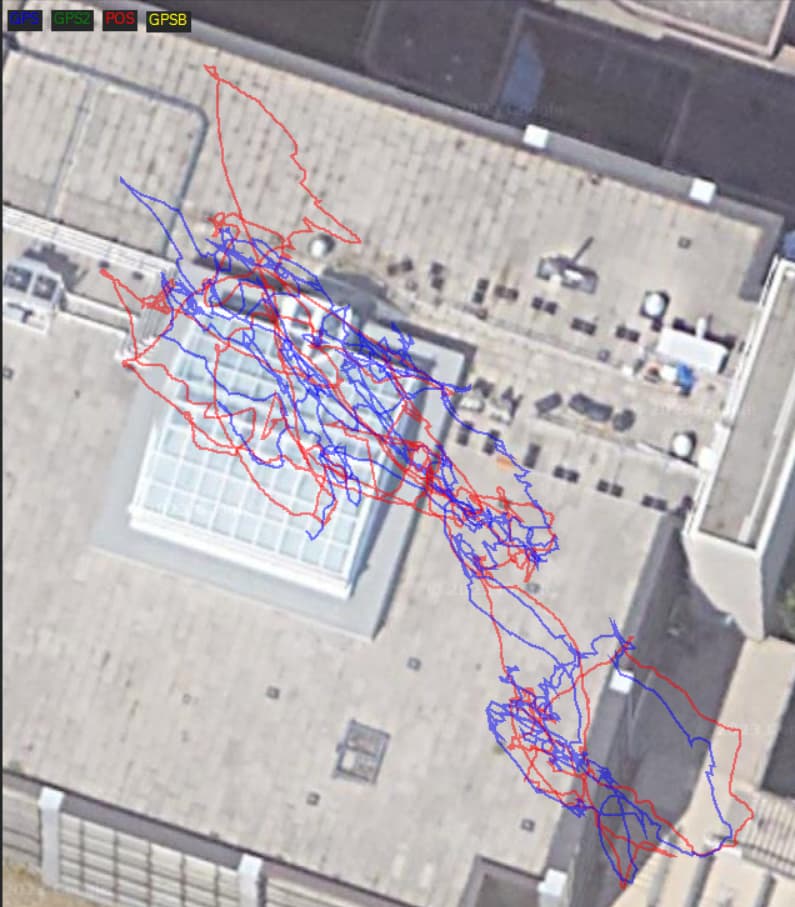
Inside the building you could have multiple compass and GPS related issues because they constantly disagree.
You can set these parameters:
ATC_THR_MIX_MAN,0.5
GPS_GNSS_MODE,67
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 // write this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_BW,40
INS_HNTCH_FREQ,90
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_HNTCH_REF,0.19
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.44
PSC_ACCZ_P,0.22
These wont really improve the attitude control, but will allow for better results from Autotune when you get a chance to do that outside with plenty of space.
Do a test flight with mostly hover, and some gentle pitch and roll, no need for aerobatics. This will allow us to refine that notch filter.
If you are OK with immediately landing if there is an attitude control issue, give these a try too, maybe as a second flight:
ATC_ANG_PIT_P,6.0
ATC_ANG_RLL_P,6.0
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_P,0.12
ATC_RAT_RLL_D,0.006
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_P,0.12
ATC_RAT_RLL_D,0.006
")