hello guys
i’m using cube and herelink with here2 gps and I’ve been fling so many times with this set up last flight in auto mode in the middle of the rout it kept yawing right and try to return and it kept rotating so i had to end the mission and back to home point
i don’t know what happens exactly???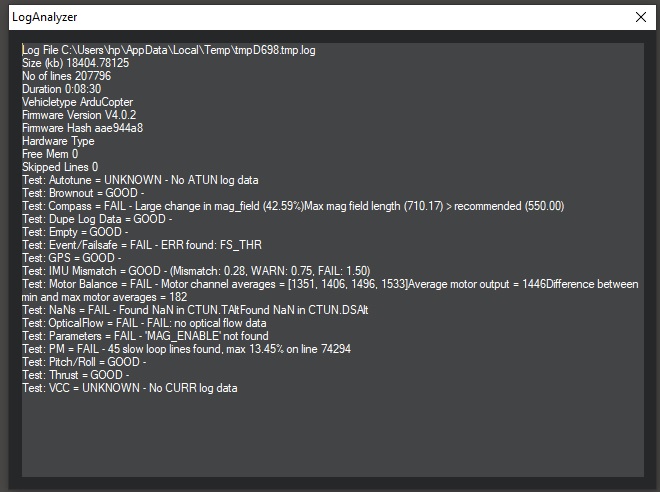
and what Motor Balance FAIL means? how to fix it?
https://drive.google.com/file/d/1mDkMCRVdg7diAtjR6UdPSIe38_fq-lPS/view?usp=sharing
this is my flight logs
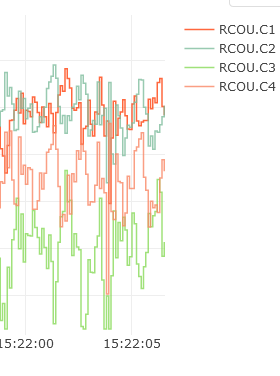
When the craft is flying “normally” the Motor 3 is at lower output than the others, Motor 1 and 2 are at higher output. Motor 4 is average. To me this indicates a weight imbalance, heavier towards motor 4. Most importantly it indicates a yaw bias, the CCW motors are working harder to counteract some phsyical issue like twisted motor mount or twisted arms.
When the trouble starts you see Motors 3 and 4 go to high output and Motor 1 goes to almost nothing.
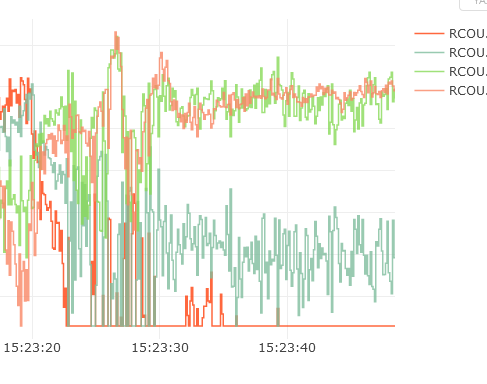
So it’s like whatever was causing the original yaw bias suddenly slipped (twisted motor mount?) and started causing a yaw bias in the opposite direction.
It really helps to get the motor mounts perfectly aligned so all props are on the same plane.
Also check physical weight balance/COG before each flight.
1 Like
thanks a lot for analyzing the logs
i’ll check it and tell you what i’ll find but there is a compass fail at mid flight when the problem started i don’t know why is that… can you please look into it
thanks in advance
I couldn’t see any compass issues really. They actually looked pretty good.
But the config did look strange to me, like the external compass is disabled and Compass2 is set as the primary - that is not typical, but could be OK. Usually the external compass is the best.
Fix up your current monitoring and you could do the Compass/Motor calibration, that could improve compass accuracy and reliability.
https://ardupilot.org/copter/docs/common-compass-setup-advanced.html#common-compass-setup-advanced-compassmot-compensation-for-interference-from-the-power-wires-escs-and-motors
You may want to set this to delay the flight controller boot and allow external compass time to boot up if that’s an issue:
BRD_BOOT_DELAY,5000
I’d definitely set these though:
BATT_ARM_VOLT,14.7
BATT_CRT_VOLT,14
BATT_LOW_VOLT,14.4
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
1 Like
Probably update to current stable Arducopter version 4.0.3 too, and pick Cube Black (if it really is) when asked during the firmware upgrade process.
1 Like
thanks a lot for your help i’ll do everything you said .