Which should be prioritized, throttle or attitude control?
If your altitude dropped, you should set throttle at higher priority
I gave priority to “ATC_THR_MIX_MIN” and “ATC_THR_MIX_MAX” as throttles, but the altitude still drops during automatic flight.
Previously, I received advice ① At high banking angle the drone cannot provide enough vertical thrust to maintain altitude. If this is the case, you need to reduce the maximum allowable attitude
For, “ANGLE_MAX” has been changed and there is no change.
② The barometer reading become less accurate when flying at high speed, which is due to change in pressure of air flow. This causes fluctuation in altitude estimate. This is the limitation of barometer based altitude estimate.
What does I want you to tell me a little more.
Can you post a video which shows the altitude drop of your copter?
Also, can I have a look at the mission, if your auto mission was set on Mission Planner?
Paste the link.
https://drive.google.com/file/d/1zeV8GkBpHp4vedTf72gd5QUvTjlOPkV5/view?usp=sharing
You can check the mission during the flight.
Can you tell me the timestamp when the copter dropped? I’m not very sure because the camera view kept moving. I can’t recognize that moment.
In your video your copter looks stable in most of time. I suspect it was due to the setting.
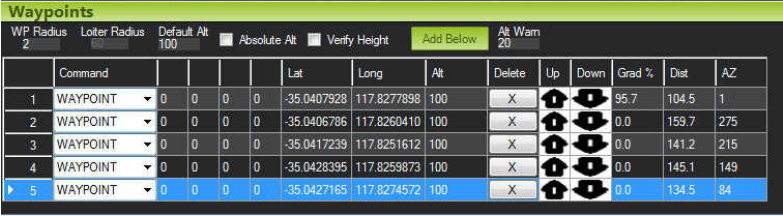
Can you let me have a look at the waypoint settings?
Share a new video.
https://drive.google.com/file/d/1CoXUJWh8gh31Yv_Gkb9AkJsyt7AsYKTS/view?usp=sharing
Since the altitude dropped in 48 seconds, I switched from automatic mode to Reuters mode, corrected the altitude, and switched to automatic mode from 57 seconds.
Since the altitude dropped in 1 minute 31 seconds, I switched from auto mode to Reuters mode, corrected the altitude, and switched to auto mode from 1 minute 36 seconds.
I will attach a flight plan.
https://drive.google.com/file/d/18Xeyhv_ZCrEWnOh6dZdyU_AV7hl-TMZQ/view?usp=sharing
Are these video the same flight with the first log? If not, please post their logs as well.
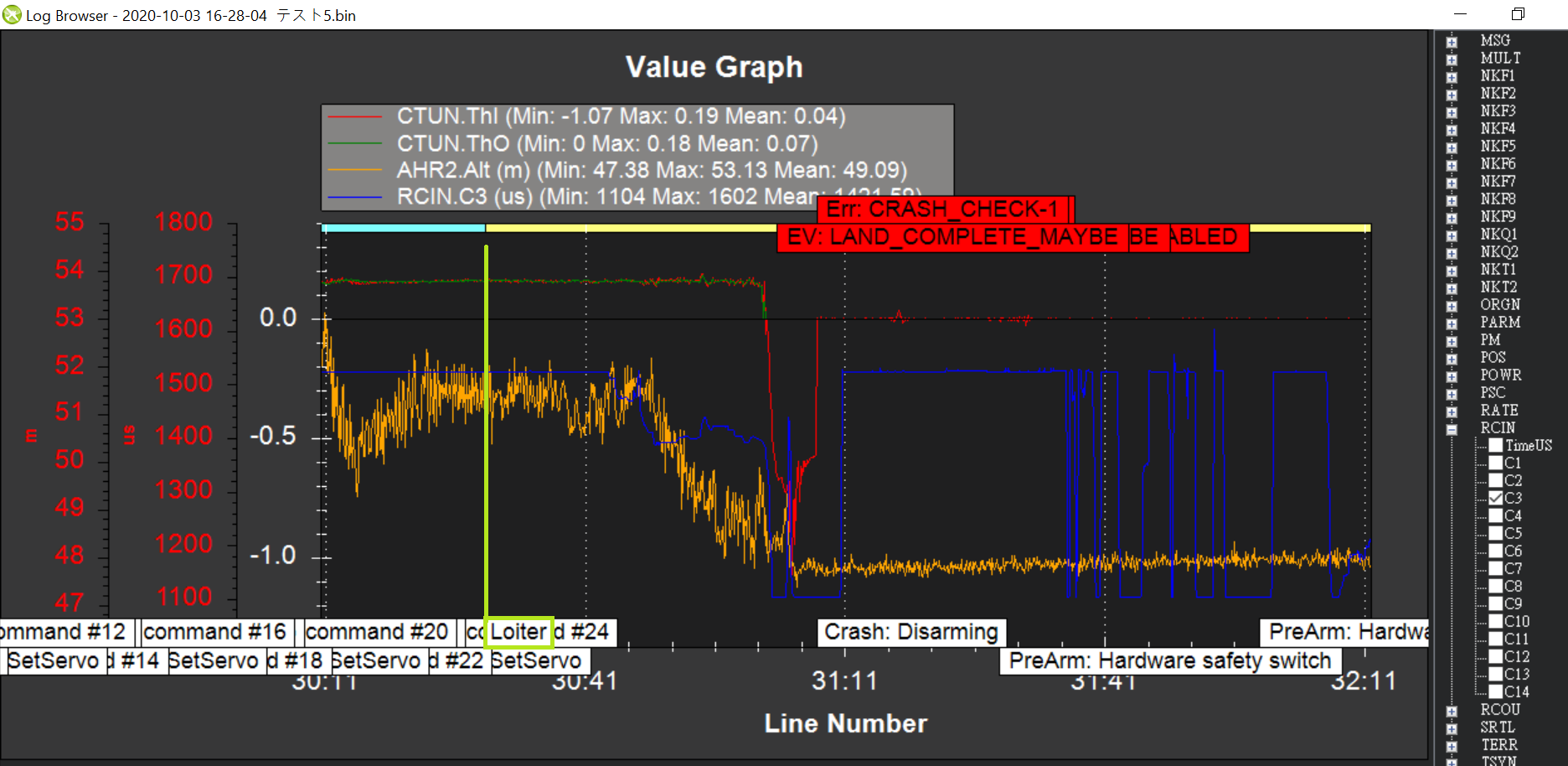
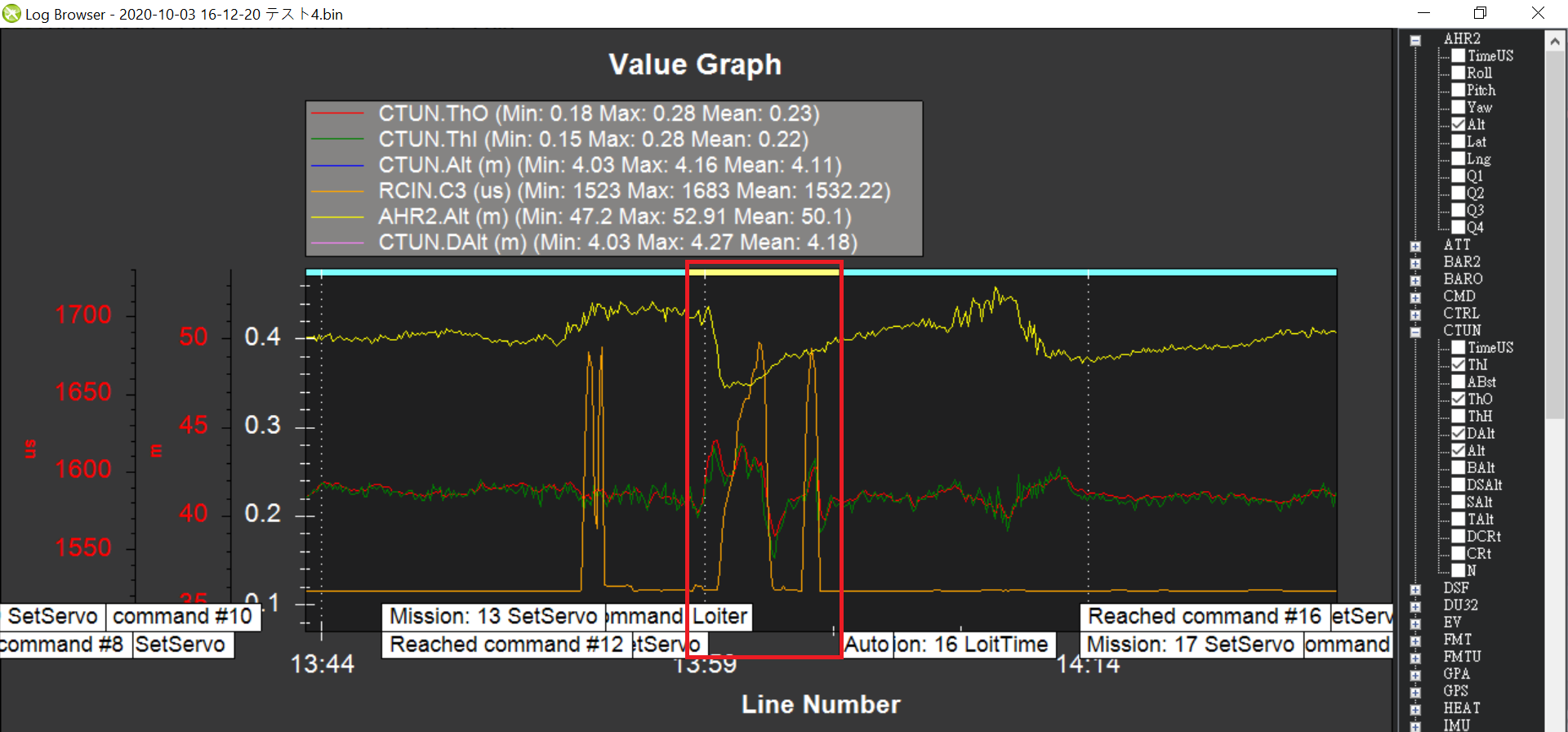
In your first log, the altitude drop occurred after you switched back to loiter mode. And there was an rc input signal started entering. Throttle in and out dropped significantly after the system regain rc3 signal. Therefore, I don’t think auto mode is the source of problem.
On the other hand, looks like the altitude dropped while autopilot kept its throttle flat.
There may be some reason your copter couldn’t remain its height with the same throttle output. This could be a sign of ESC failure, but we can’t tell unless voltage and/or current monitoring is available.
Attach the log.
https://drive.google.com/file/d/1ae5XbzExkCBVKSv1rGzyDiw3o75IxZVW/view?usp=sharing
Is there any other information I need?
What are the causes of ESC failure?
From the log I can see you have switched to loiter mode from auto mode for 3 times
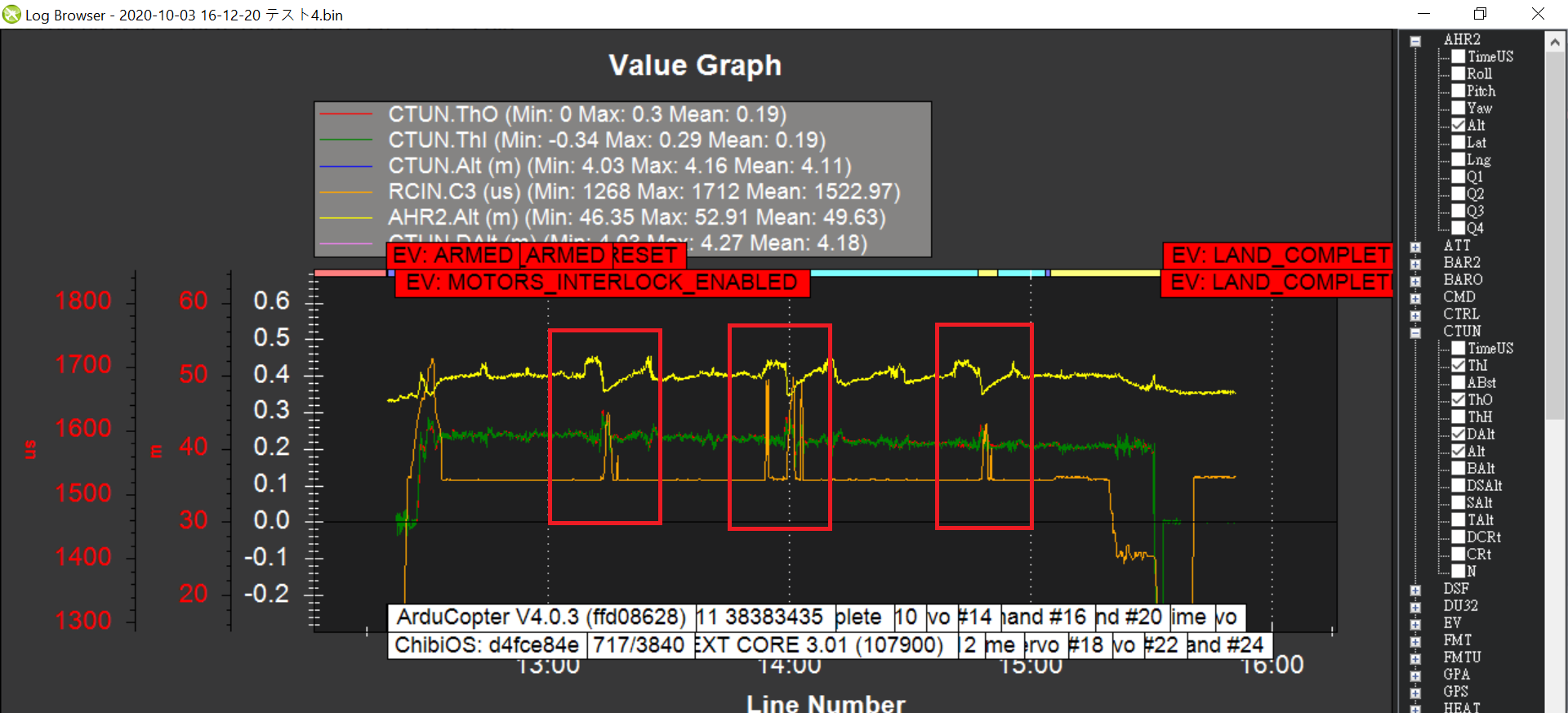
where there are 3 periods that there was throttle input.
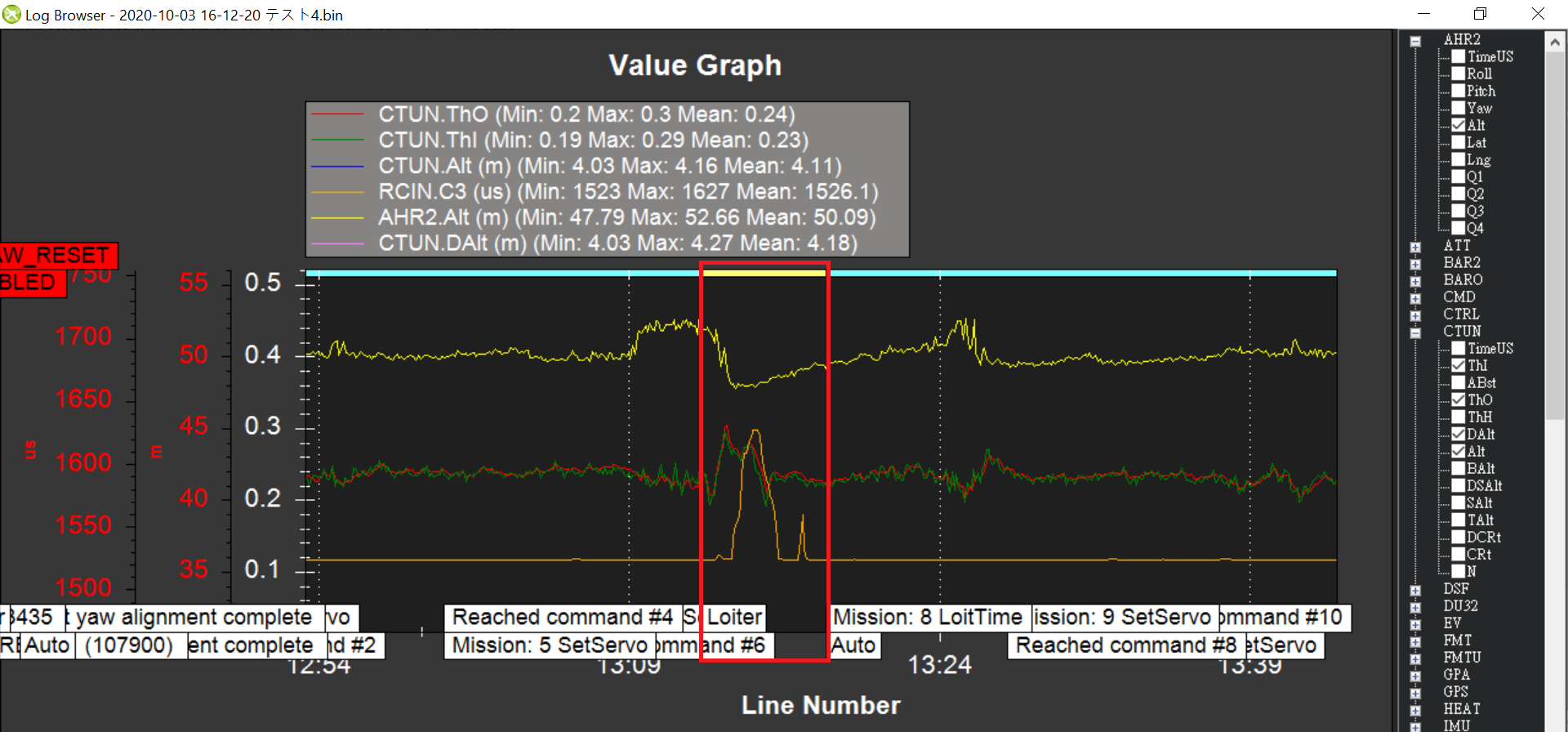
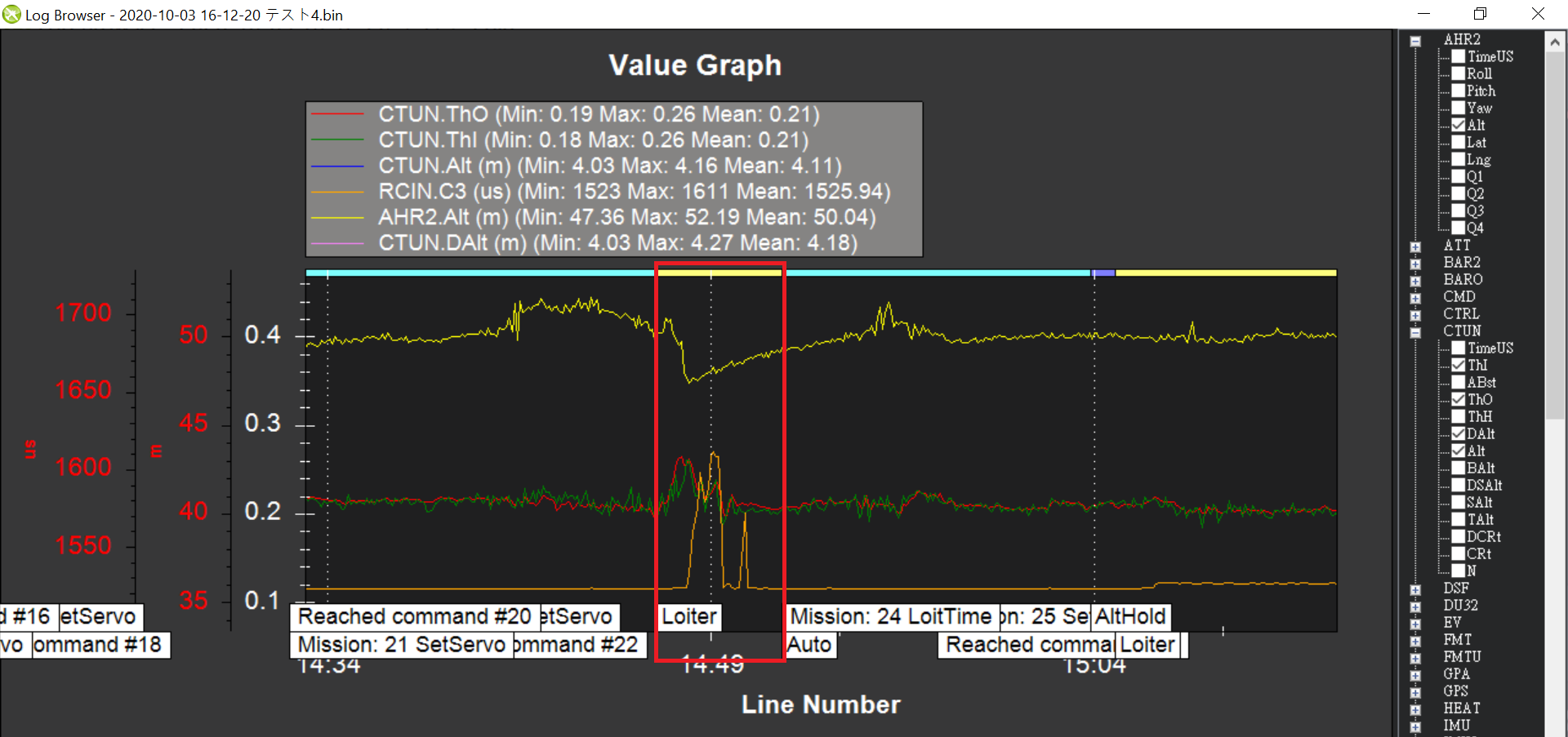
If you look closely, you can see that the altitude drop occurred after you switched to loiter mode.
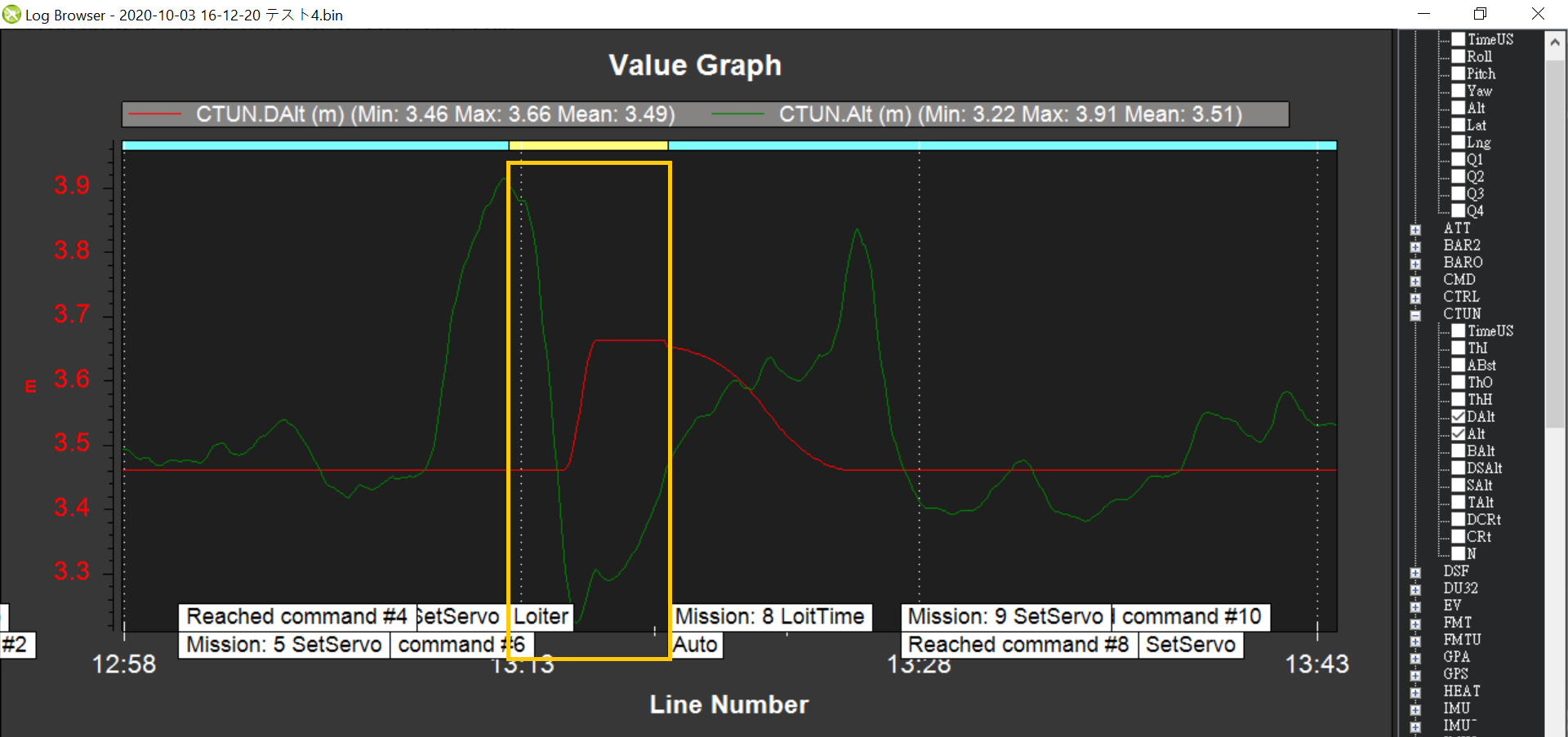
It was either you lowered the altitude, or your copter has untuned pid. You may try auto tune.
ESC failure is a hardware failure, there are different reasons. Please ask their manufacturer if you are sure they do failed.
AUTOTUNE did all three axes. Should I go again?
I think you need an altimeter such as lidar for good terrain following for agriculture purpose.
I don’t think altitude drop from your video does matter to your application. It’s not significant for me. I still think it is due to your fast movement interfered the baro.
As Sjourney said, you may try to add a lidar
Thank you.
This flight is carried out without the fuselage cover.
- A photo is attached.
Is there any influence here?

Yes. There will be interference to baro if you don’t have a cover.
I will report by attaching the cover and flying.
I attached the cover and flew, but the altitude drops.
Will it be solved by installing a sonar?
Are you able to solve the problem. I’m also facing same issue please guide me.
Please open a new thread, describe your issue in detail and share logs.