The altitude drops during flight in AUTO MODE.
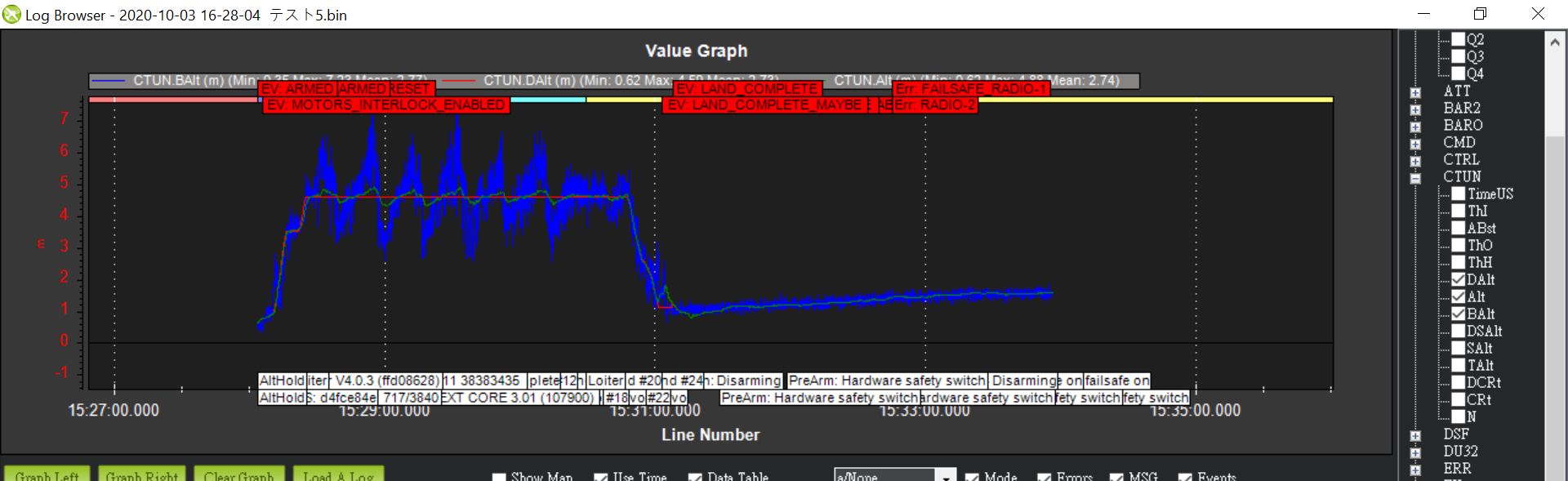
CTUN BAlt, DAlt and Alt do not match.
I will attach the log.
https://drive.google.com/file/d/1UJtwpCk-0vTc8sqDz5fFMY7rc9a8Uzm3/view?usp=sharing
The altitude drops during flight in AUTO MODE.
CTUN BAlt, DAlt and Alt do not match.
I will attach the log.
https://drive.google.com/file/d/1UJtwpCk-0vTc8sqDz5fFMY7rc9a8Uzm3/view?usp=sharing
Need authorization to the drive
You authorized viewing but not downloading. I still can’t access your log
https://drive.google.com/file/d/1UJtwpCk-0vTc8sqDz5fFMY7rc9a8Uzm3/view?usp=sharing
sorry
I will attach the log.
Did you try to take back the control when the copter is falling?
Did you set up any battery sensing? I can’t see any battery voltage in the log
Can you verify if your cables and battery are good?
Battery sensing is not done.
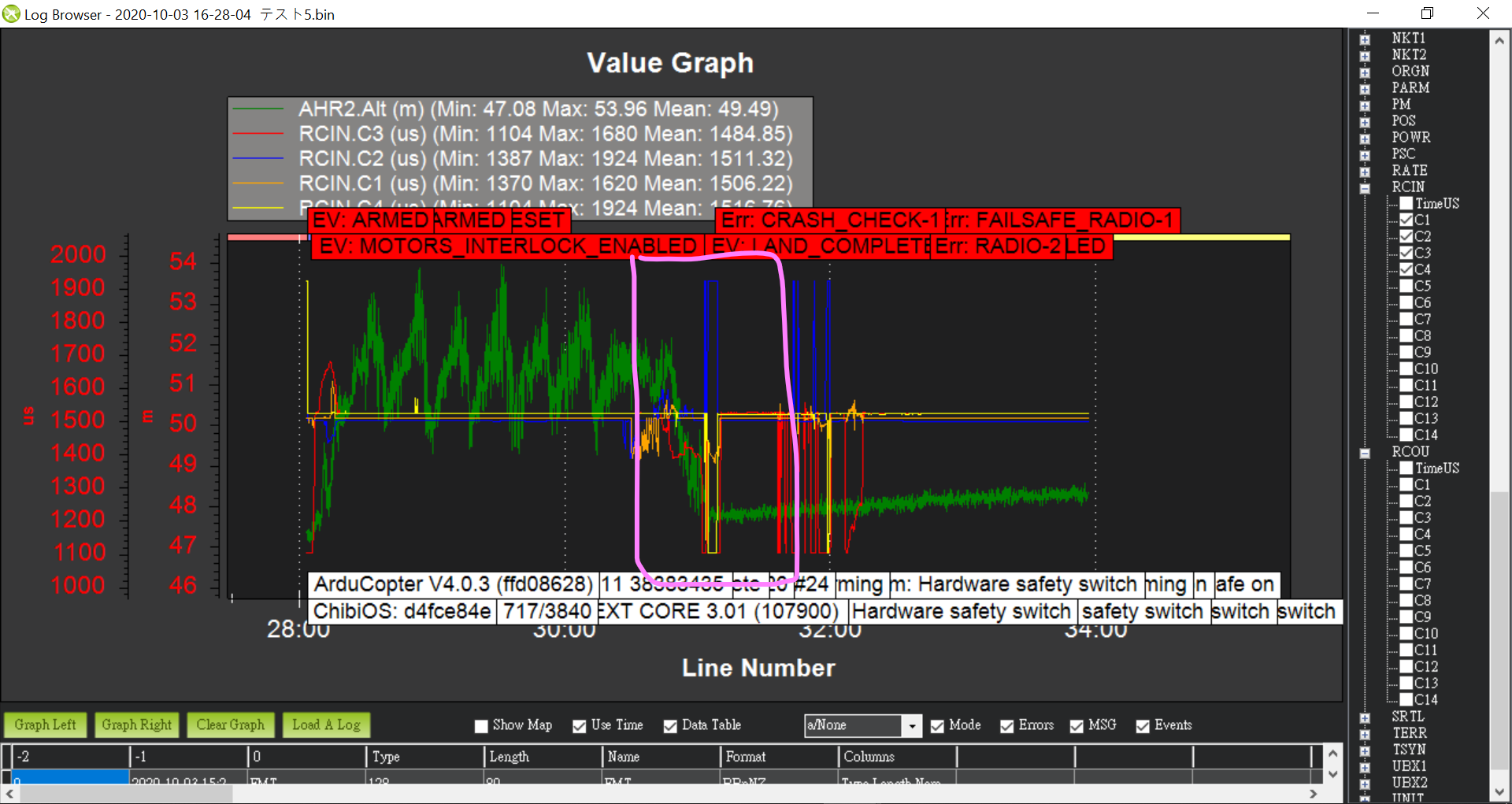
“DAlt, Alt, and BAlt” are consistent, why does the altitude go down?
Just to clarify, what do you mean by “altitude go down”?
Do you mean falling from 50+metres or the fluctuation during the flight?
If you mean falling from 50+metres, then it looks like a battery problem because the pwm outputs does not reduce suddenly during this period
When flying in auto mode (5m), your behavior will drop.
Sorry I don’t get it
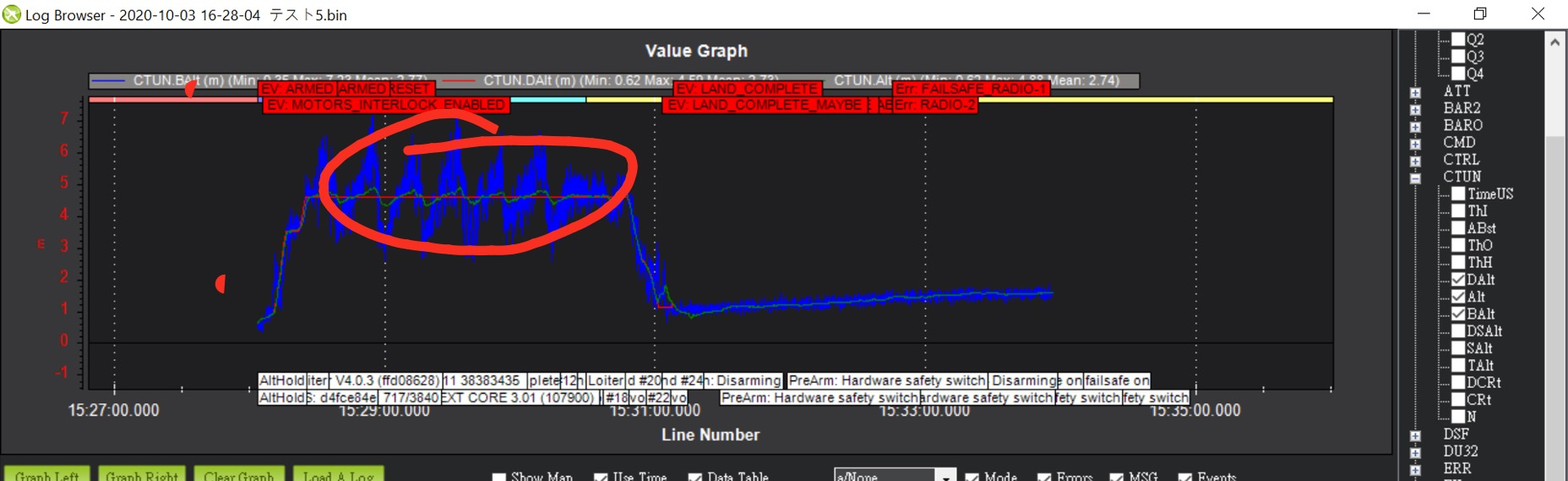
It is a phenomenon that the altitude gradually decreases from the specified altitude during automode.
Then it looks like battery problem
This phenomenon does not occur at low speeds. It happens at high speed.
Battery problem seems reasonable. Motor consumes more power when it spins faster.
From your description, does altitude loss happen everytime and re-creatable?
It happens every time you fly at high speed.
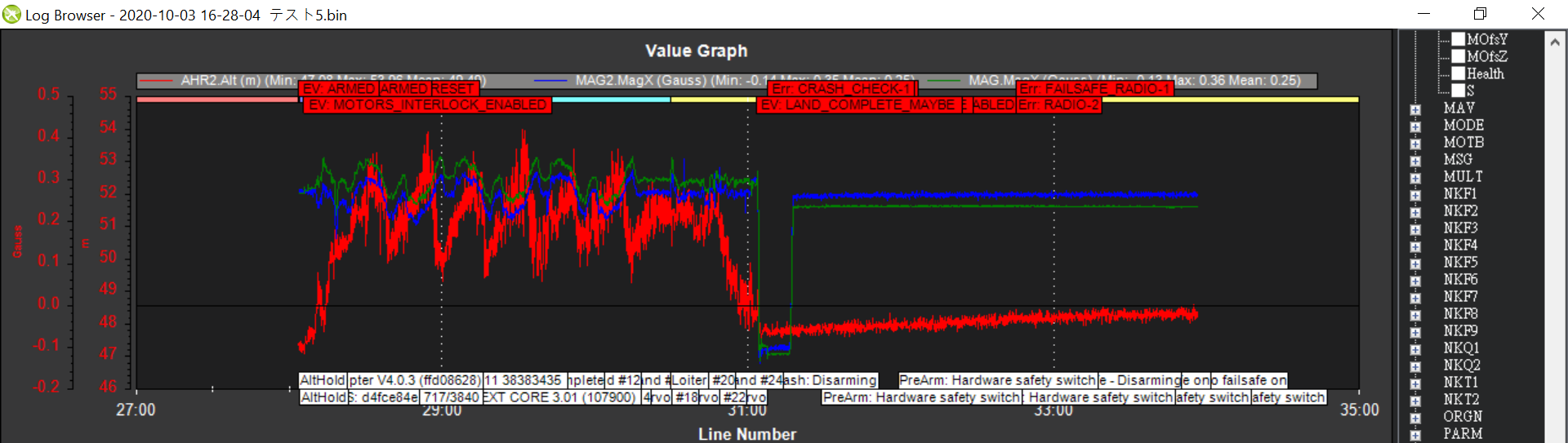
In this case there are 2 possibilities.
The barometer reading become less accurate when flying at high speed, which is due to change in pressure of air flow. This causes fluctuation in altitude estimate. This is the limitation of barometer based altitude estimate
At high banking angle the drone cannot provide enough vertical thrust to maintain altitude. If this is the case, you need to reduce the maximum allowable attitude
Is it necessary to set any parameters for “1” and “2”?
It depends on what do you want to do. There is no perfect answer for the parameter settings for every single setup. You need to fine tune it.
I want to fly at the set altitude.
You may try to adjust ATC_THR_MIX_MIN and ATC_THR_MIX_MAX
to fine tune between throttle and attitude control