I use Pixhawk Cube-orange with Arducopter 4.0.3 frame type: quadro X.
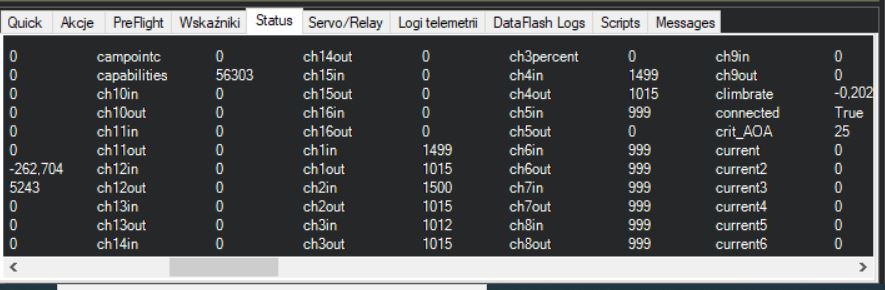
I would like use AUX (1-6) as RC channels (RC9-RC14). In status window
chin9 - chin14 is pwm level 0 despite from Radio is signal 1000-2000us.
How solve this problem??
The SERVO settings are what you are after.
The RC settings are inputs from the reciever, and SERVO settings are outputs to motors and similar.
For AUX1 output use SERVO9_FUNCTION
To set it to mirror a RC input, set SERVO9_FUNCTION,(51 to 66) to suit your RC input channel.
Setting SERVO9_FUNCTION to value 1 (RC Passthrough) would pass RC channel 9 to servo9 output. RC Passthrough would rarely be used - it’d be better to set the specific RC channel.
If you’ve got some specific function in mind, like Camera tilt, Landing Gear or Sprayer - then better to set that function and let the flight controller operate it under certain conditions, so you dont need to be flicking a switch on your transmitter unnecessarily. Works better in Auto mode for missions too.
You’d obviously also need to set up other associated parameters for that function.