Following the set-up process in the ArduCopter docs is fairly straightforward - if a bit laborious.
The docs reference checking messages for EKF5.meaRng - which I assume is a log of the distances the Hereflow lidar measures. I can’t find that anywhere - although “sonarrange” on the Mission Planner Status tab seems to showing the lidar distances being measured.
I plan to install a Lightware LW20/C for better rangefinder capabilities - but I’d like to ensure everything is working OK on the HereFlow first.
If anyone has some guidance about this, I’d greatly appreciate it. Thank you!
The name for lidar range in the logs has changed - it now seems to be XKF5.mg - but I’ve been unable to verify that. When graphed, it does appear to graph lidar range data - but the independent axis on the Mission Planner graphs is unlabeled.
Someone suggested this name change occurred with EKF3 implementation.
Regardless - it would be helpful if the docs were updated to show the correct parameters.
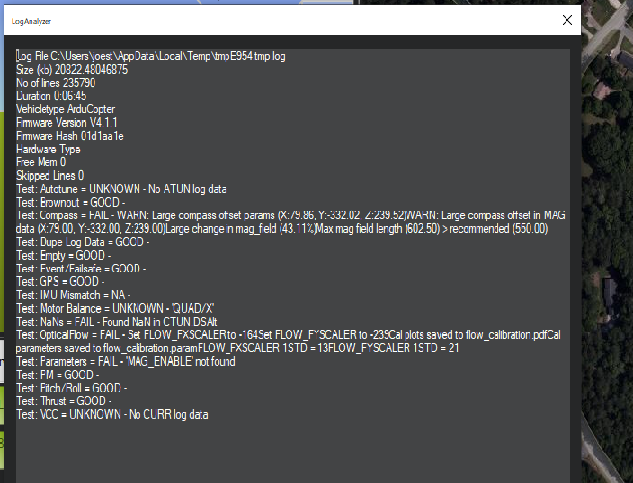
Another point of interest on the HereFlow - The Mission Planner’s “Auto Analysis” function for data logs will suggest settings for flow_fyscaler and flow_fxscaler. As the calibration process isn’t easy - it would be helpful to know if these suggested values are valid.
Here’s an example:
The graphs reported don’t seem to be created - I couldn’t find them. And I’m not sure what “1STD” means - perhaps one standard deviation.
If you can shed any light on this, it would be very helpful.
As long as sonarrange shows the change in distance, the hardware should be good.
For where is the EKF fused rangefinder range in log, you may need to ask on Ardupilot forum.
Thanks Alvin - I think I have the correct parameters to check range now - there are BIN file parameter specific to rangefinders. For example: RFND.0.Dist
I still need help understanding and setting the flow_fyscaler and flow_fxscaler parameters.
And yes, I’ve been discussing all this on the ardupilot side of the “discuss” forum.