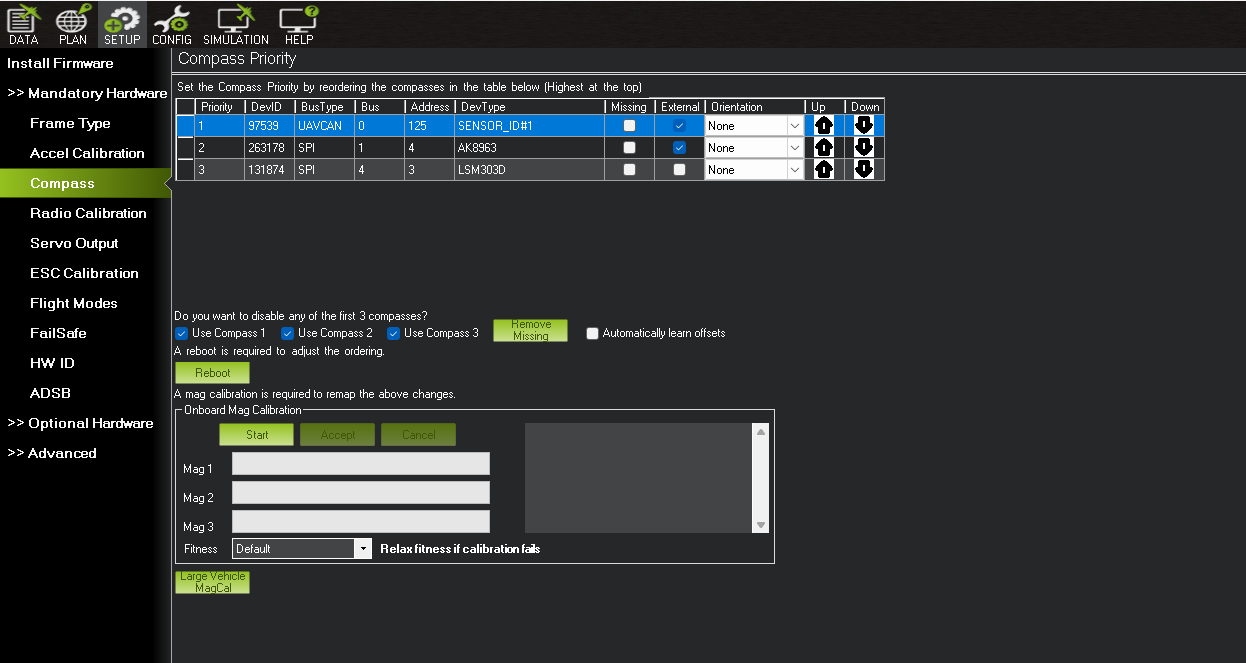
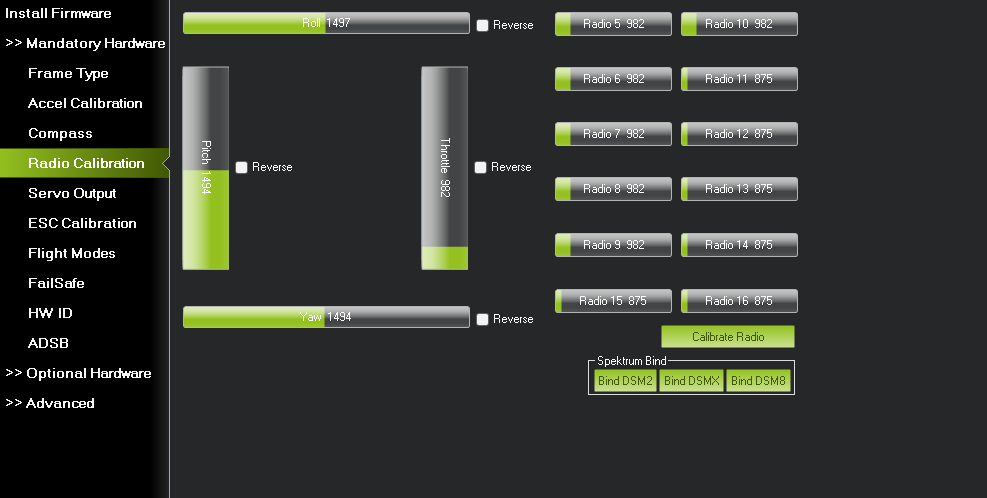
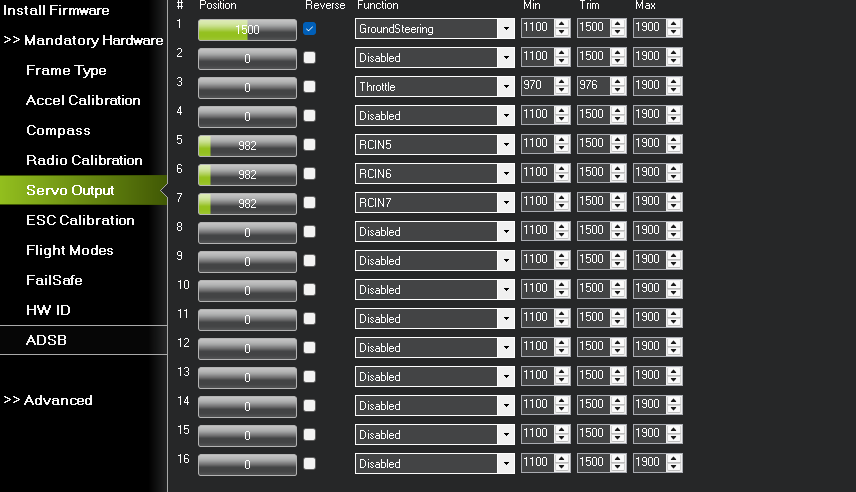
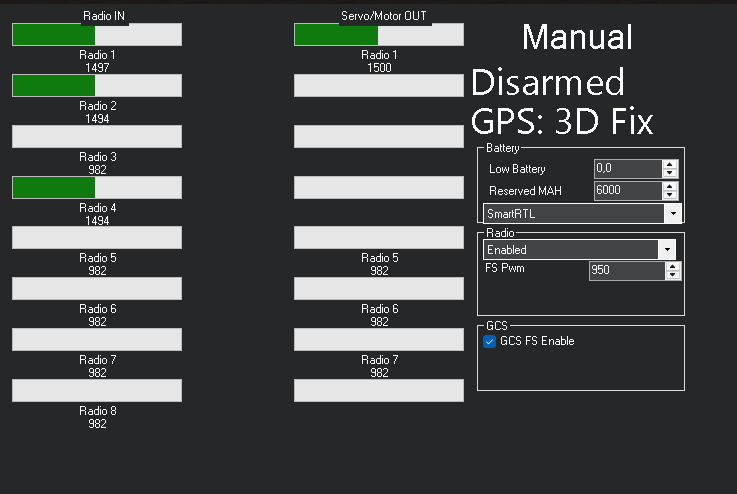
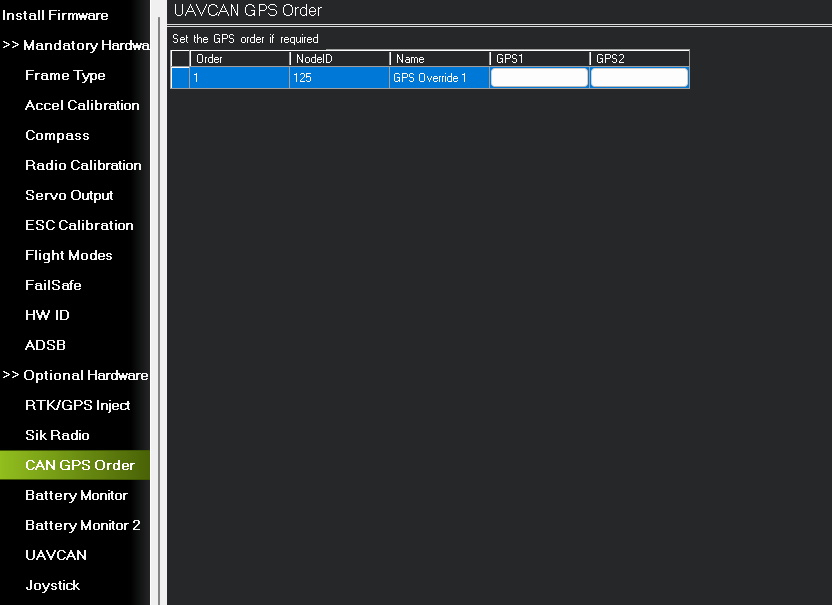
Hello, am currently trying to reprogram my rc autonomous boat because i foolishly updated the firmware of the pilot without saving my parameters. At long last i found a firmware similar to what i had before and it seems that its functioning well on manual mode. For context my current setup is:(Here 2 GPS/COMPASS in UAVCAN mode and unknown firmware, Cube black autopilot with ardurover 4.1.0, 2 RFD868x modules with v3.13(one on my boat and on on the TARANIS RC),QGC(latest available version). Here is the problem, when i go to the QGC to put a rover mission, despite saying ready to fly, i upload the mission and when i slide to start the mission it says(Guided flight mode,ARMED, Auto flight mode) and doesnt start the throttle making a beeping noise.Also the EKF is red for some time(5-10secs) before turning white and functional letting the boat to arm. If i pause the mission and then restart it the boat starts the throttle correctly but then sometimes when i try to carry it from its stand to the sea to see if the mission will be done correctly, it stops the throttle. If i then give some power from the Taranis transmiter to the throttle the throttle obeys and it executes the mission decently. Here i would like to tell you that before all this my boat had no problems with mission planing and i was using an older firmware(ardurover) which i cant remember and an older QGC(4.0.11). The reason i was using that QGC it was because even if my boat is technically a rover, i could give a multi-rotor mission that allowed me to control the speed of the boat in each WP. Bottom line is i want an RC boat that has ,one throttle servo,one steering servo, one bait release servo and 2 kinds of lights(red and white) to do the following:(An auto mission that i can control the WP_ speed of the boat, The RTL and Smart RTL functions as well as the basic, transmitter,telemetry,throttle e.t.c Failsafes without any problems or bugs.). I will leave you with my screenshots of what i think might help you help me so that you can tell me if something seems odd and might be at fault here. Thank you in advance:
Parameters.zip (4.5 KB)