This month has been marked by significant progress across various fronts, from software subteam to mechanical subteam, composites subteam and electrical subteam. Let’s dive into the details:
SOFTWARE SUBTEAM
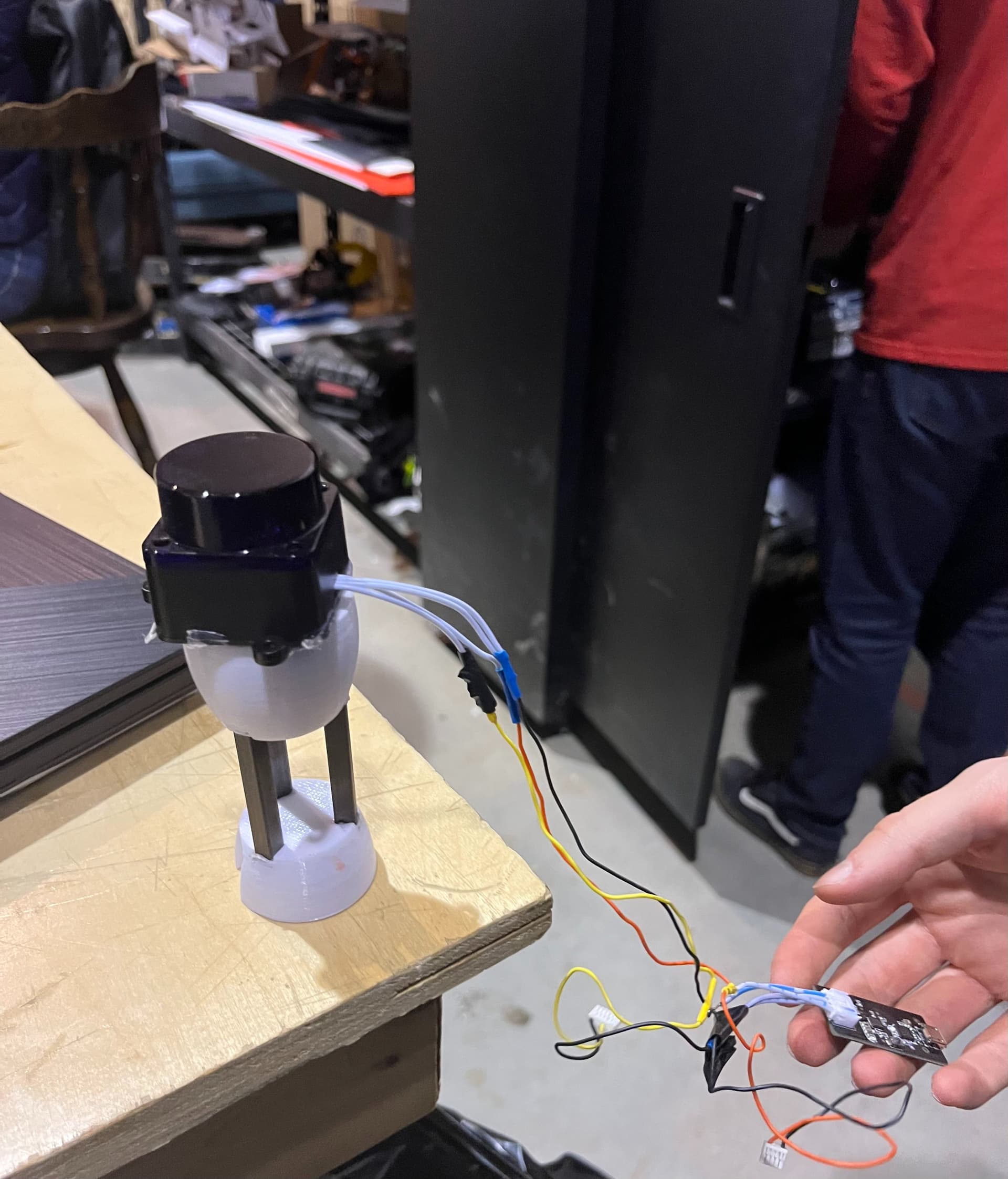
One of the notable achievements this month was the successful integration of a lidar unit with our ArduPilots. Despite initial compatibility issues, our team swiftly devised a custom Python program to seamlessly integrate the lidar data with our Cube, utilizing Madlink for communication. This now enables us to leverage object avoidance capabilities built into our ArduPilots, enhancing autonomous flight capabilities and significantly reducing the risk of collisions.
ELECTRICAL SUBTEAM
Thanks to the generous sponsorship from CubePilot, we successfully implemented high-precision GPS systems into our drones. Throughout the month, we focused on enhancing the positional accuracy of our drones by integrating Real-Time Kinematics (RTK) technology in conjunction with existing GPS units and CubePilot flight computers.
COMPOSITES SUBTEAM
We made significant strides in mold fabrication. Our team completed the first half of the carbon fiber shell molds and commenced work on the second half. Utilizing MDF for mold construction, we also acquired essential components to ensure seamless lay-up processes, minimizing the risk of material adhesion and optimizing the overall manufacturing workflow.
MECHANICAL SUBTEAM
Our team achieved several milestones. We successfully fabricated a carbon fiber mold and tested it during helicopter flights, demonstrating its structural integrity and performance under real-world conditions. Additionally, we developed a cutting-edge gimbal system equipped with a Storm 32-bit controller board and two brushless motors. This new setup offers substantially faster response times compared to traditional servo motors, paving the way for smoother and more precise aerial photography and videography.
