since i2c bus is entirely useless with the CAN bus system active. i moved to pwm input in the AUX outs. my sensor is VL53L1X time of flight sensor which can measure upto 400cm.
using arduino board i got a pwm out map to the sensor values.
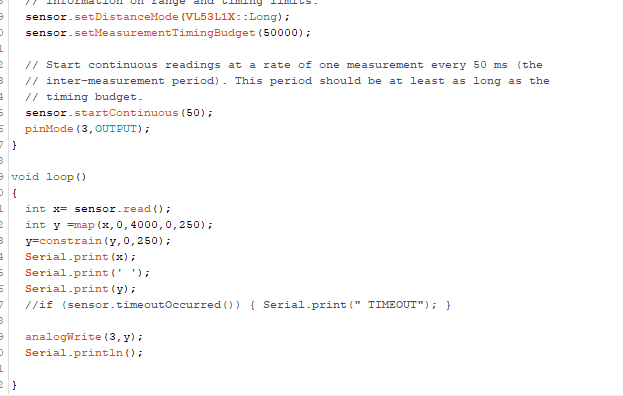
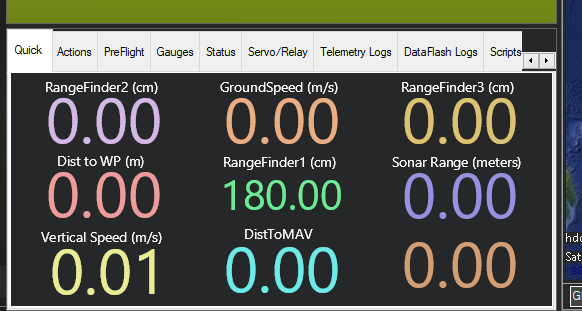
and measurement are reading correctly with the cube. but it only display upto 200cm only.
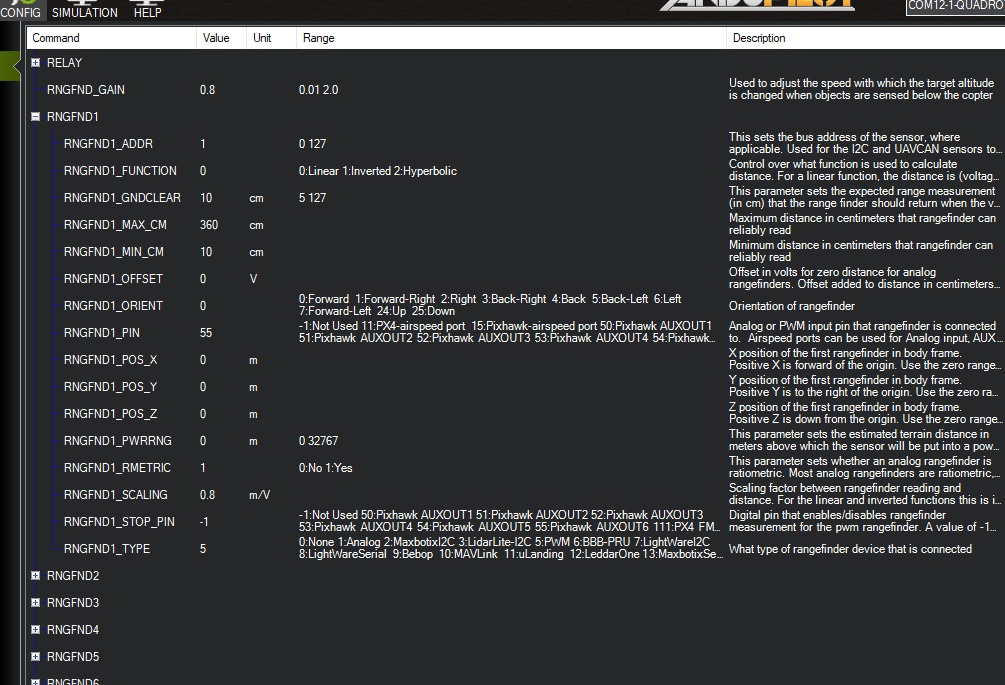
i tried changing all of the max/min , scaling and offset parameters in cube. but nothing seems to work effectively. it almost like there is no reaction to any changes i made in the parameter list. these are my parameters
can you help me to figure this out. i need the full capability of the sensor to be utilised.
@MadRC @rmackay9 @Anubis
thanks in advance.
best reagrds