I have made a new frame that I am validating.
It is an 18 kg hex with 27.5 "propellers with cube black and 2x GPS Here (v1).
Firmware 4.03
12S
Telemetry now based on Herelink and for the Tuning process I have continued to use a 2.4 control, because the small sticks of the Herelink do not find them very comfortable for that task.
It is based on a slightly smaller prototype (24 ") that has been operating very well and has already accumulated more than 50 flight hours.
Autotune passed (values that I have slightly modified).
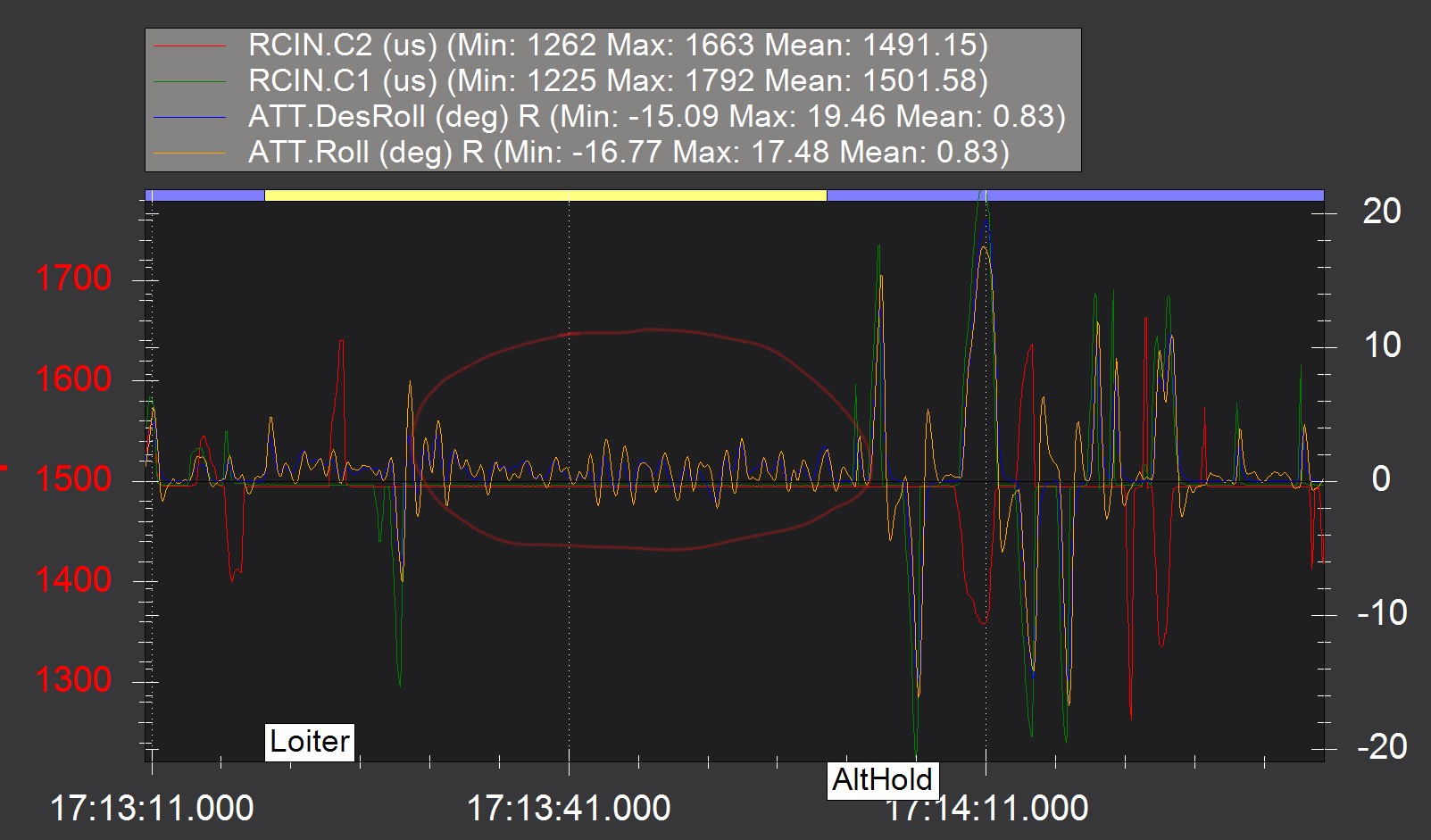
However, changing Loiter’s behavior makes it appear unstable.
I’ve only flown it in Loiter for a few seconds. And it is enough to notice that something is not right.
From the first lateral inputs the drone “bounces” as if it had an excess of P I D and the ATC rates were very high, however they are quite reasonable… i think even a litle slow…
I am clear that without load, as I am flying it for now, it is an overpowered drone: MOT_THST_HOVER = 0.179
However, as a counterpart, the behavior in AltHold is near to perfect and it flies very well. It also flies perfectly in stabilze.
Even in Loiter, without trying to move it, it stays perfectly in place.
The vibrations are minimal.
The energy is clean
I share the LOG and PARAMS to receive your appreciations.
https://drive.google.com/drive/folders/1oCT-P_YEgS6TLIGfFHKlIeNdcUilUwcv?usp=sharing
Cheers !