A Holybro 650 frame kit is nice, if you can get away with using 14inch or 15inch props. I’m putting one together now with parts we already had but it’s not ready for flight yet.
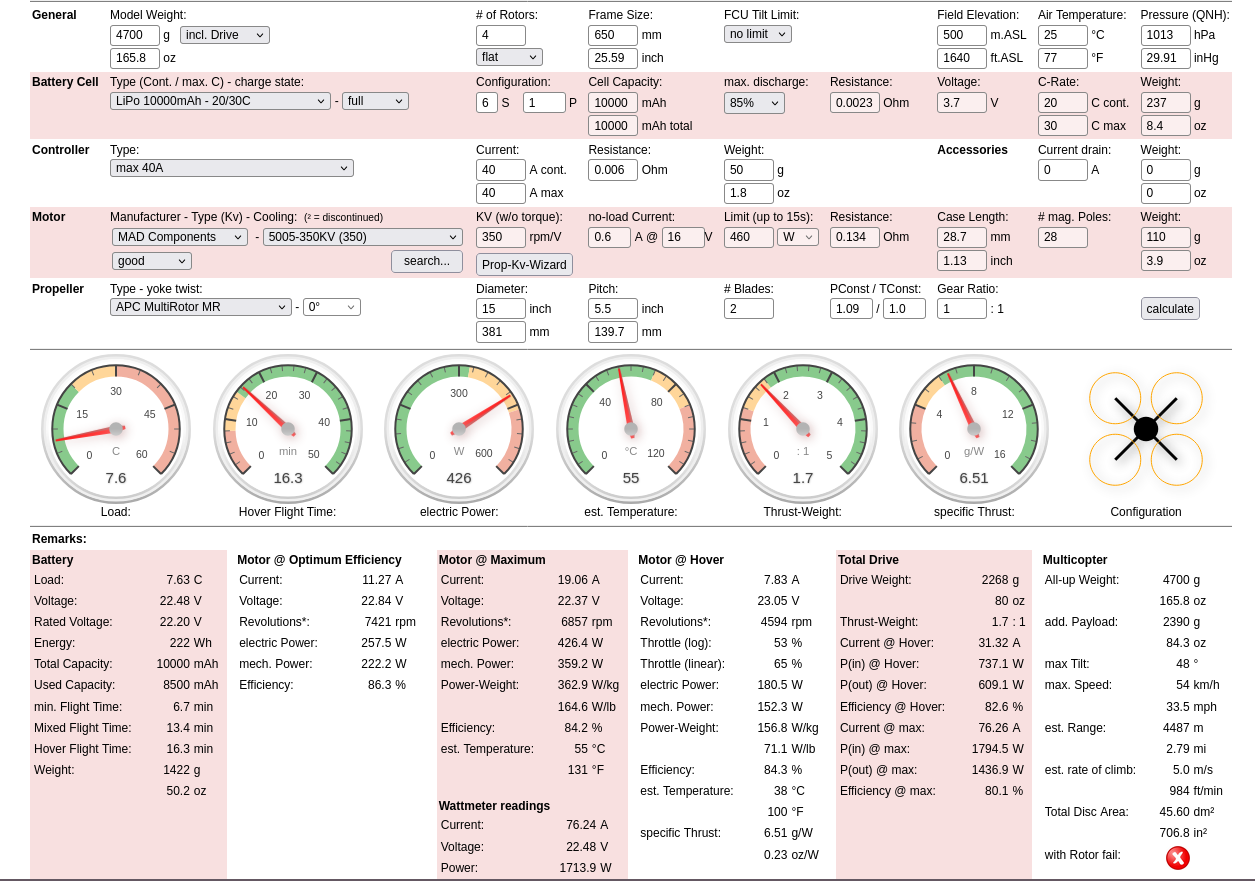
I threw some rough values into ecalc and a copter of that weight will struggle a bit - we’re looking for a thrust:weight ratio of 2 or there’ll be some difficulty.
I think you need to step up to the MAD 5010-370kv with 16x5.5 APC MR props.
This will give you reasonable headroom for wind, manoeuvring and an easier life on the electrics.
You wont need a 100C battery, that’s unrealistic. You’ll get away with something around 20C 10Ahr
10 amp hours is 10000 milliamp hours. As for as the temp rating, thats what I found with that battery. If I missed something on my learning curve, I dont mind you chiming in.
This was listed with the motor data. It shows the motors are good for about 6 kg with 4 of them on the hover and 11.6kgf. as far as the normal rule of 2x the thrust on the weight, I beleive they accouted for it noting is was for ann expection drone and surveying since the competition racings drones I beleive are arounf 5x the force? Anyways here is the sheet. I was wanting to shop before, and was looking for a good way to find weights carried per motor with a suggested prop on the generics out there.
I see what I may have done wrong. I guess I have to put drive included and add a kit each time. Thought the best way was to let the program add it by not including them. I had bought some time on it before the suggestion and tried it. Will go back. The temp of the battery. Clarify for me, about it being unrealistic.
The temperature rating of the battery shouldnt be an issue, those big batteries spread the heat out more than smaller batteries, and you’ll still only have 20 minutes or less flight time for heat to build up. For there to be a heat problem (electrical load) you will notice it first in the ESCs and motors.
The “C” rating is a multiplier for the battery Amp hours to give the expected maximum current.
So a 10Ahr 20C battery could be expected to do 200 Amps peak.
Smaller batteries, like a 2200mAhr tend to have higher C rating because they can still do a crazy current, like 200 Amps, which would be 90C in this case.
Often you see two C ratings like this: 10C/20C
which means 10C continuous, 20C peak.
For a 10Ahr 100C battery (1000amps !! ) you would need a flying car to carry that around in, not a small multirotor For a 6S 10Ahr battery to be 100C it would need 4 extra cells in parallel with each of your first six series cells, making it a 6S5P battery, and it would be 5 times the weight
S and P mean Serial and Parallel.
ecalc is not exactly perfect, but it’s usually quite close given the correct data. If it thinks your 5005 350kv motors would struggle with the weight you are suggesting, then I would tend to believe it. You might get such a copter to work, and it may even be able to fly around for a while, but when the first gust of wind comes along we’ll be doing a crash investigation.
I’ve found ecalc to be a little on the conservative side, so struggling with the 5005 motors might be OK for some people, and you may see better performance than ecalc predicts - but for the price difference between the 5005’s and the 5010’s do you want to risk your payload, props and frame, when the 5010’s wouldnt be struggling.
Don’t go cheap on the props either. get genuine APC if you stay with plastic, or go to good quality CF if the payload is staying attached full time.
Are you using a cube flight controller with the Holybro x650 build? I’m considering something similar and curious if you’ve bumped into any integration challenges; I haven’t found much info online about anyone with a similar build considering Holybro makes their own controller.
You can use any good quality flight controller with such a frame, you wouldnt want to use a cheap FC and risk it having an issue in flight when the frame (and payload) could be quite expensive, not to mention the scope for other damage.
I’ve got a different frame with a Cube Orange, it’s a Quad X8 format - this is our “beater” for testing new firmware versions and whatever features we might need.
The HolyBro X650 frame has a CUAV X7 - the power connectors are different but everything else is the basically same, and the flight controllers are treated the same in nearly all respects. The X7 is used because that’s what we had available and I needed to test one out for someone else’s build. This will be more of a camera drone.
The build has been slightly delayed so it hasnt flown yet but I dont anticipate any issues since the frame seems good quality and is nice and stiff.
After constructing most of the drone (including battery) minus motors and esc’s, it comes in about 2.6 and may have an allowance for a good camera later at 3.4 for total weight. Payload was already included only at 49g camera. Holder for esc’s and motors not yet accounted for. It can have up to 11,000 mm length from motor to motor. I have 4 350kv motors and 4 15x5.5 props. What would the best length end to end on the motor width apart? Would the props and motors work?
mad motor 5005 109g each
havoc props 27g each (load capacity 7kg) recommended rpm 3000-4500 RPM
thanks.
Try to keep the ESCs mounted inboard, as close as practical to their power source. The motor wires can be as long as required, they do not have a maximum length in your situation.
The arms only need to be long enough so the props clear the centre plates and each other by some reasonable amount, say a couple of inches.
Try selecting your components in ecalc - a subscription costs less than the price of a prop.
Diameter or “wheelbase”
Also choose the nearest battery (and other components) to yours and just just add payload to make it up to your expected total takeoff weight.
actual weight of the drone, now that it is assembled is 5.8 lbs with payload. I do not see the camera being upgraded past another 2 lbs. 7.8lbs (3408g in total.)
The questions you helped me with is battery. Is there a formula or a site that has a plug in for that? I have trouble with ecalc when entering new information and it does not provide a way to present batteries as options.
As for the motors and heat, I suspect that the larger the kv rating the more heat. Between the motor, prop and battery it needs a balance. Do I need a 6s battery/esc combination or is a less voltage still ok?
Technical question: ESC’s seem like rransformers. What are the characteristics that make it diffierent?
Thanks,
Charles Spencer
ESCs are a series of MOSFETS (fast electronic switches) that connect the battery supply voltage to motor windings in turn.
The ESC firmware can do everything from basic square waves - which means almost no heat dissipation in the ESC.
… right through to a simulated sine wave - which means quite a bit of heat dissipation. Even this is expected and allowed for in the design and firmware.
The problem is when your motor outputs (signals TO the ESCs) have oscillations, escpecially high frequency oscillations, will generate motor-killing heat in the motors and in the ESCs too.
In ecalc I put in the total weight (inc drive) if you already know the weight of everything. If motors or batteries are still an unknown you can select the “without drive” or “without battery” options and put in the total weight you DO know then adjust the overall weight by tweaking the payload weight.
The kv rating itself of the motor wont make much difference to the heat - the amount of work it has to do will dictate the heat, and the fact that small high-kv motors tend to be run at or near their full output most of the time… With bigger motors we prefer it runs at about half it’s maximum output during normal use, so there’s over head for disturbances and manoeuvring. Properly sized motors on a well tuned copter will barely get above air temperature.
EDIT:
Looking back at my screenshot of ecalc, are you saying the total weight now is 3408g ? Or is that 3408g without a battery?
I think you are trying to decide on what size and number of cells to get - right?