hi everyone!
I have a hexsoon edu450 Quad Frame, with this specs
-Original frame, motors, ESC and props
I tought the 4S battery could be a quite heavy for the drone, but the MOT_THST_HOVER is 0,36, to I think we are ok with the weight.
The problem is when I do a long roll (right, left, or pitch ) the quad go down at lest 1 meter, when the roll finish, que quad try to get altitde again.
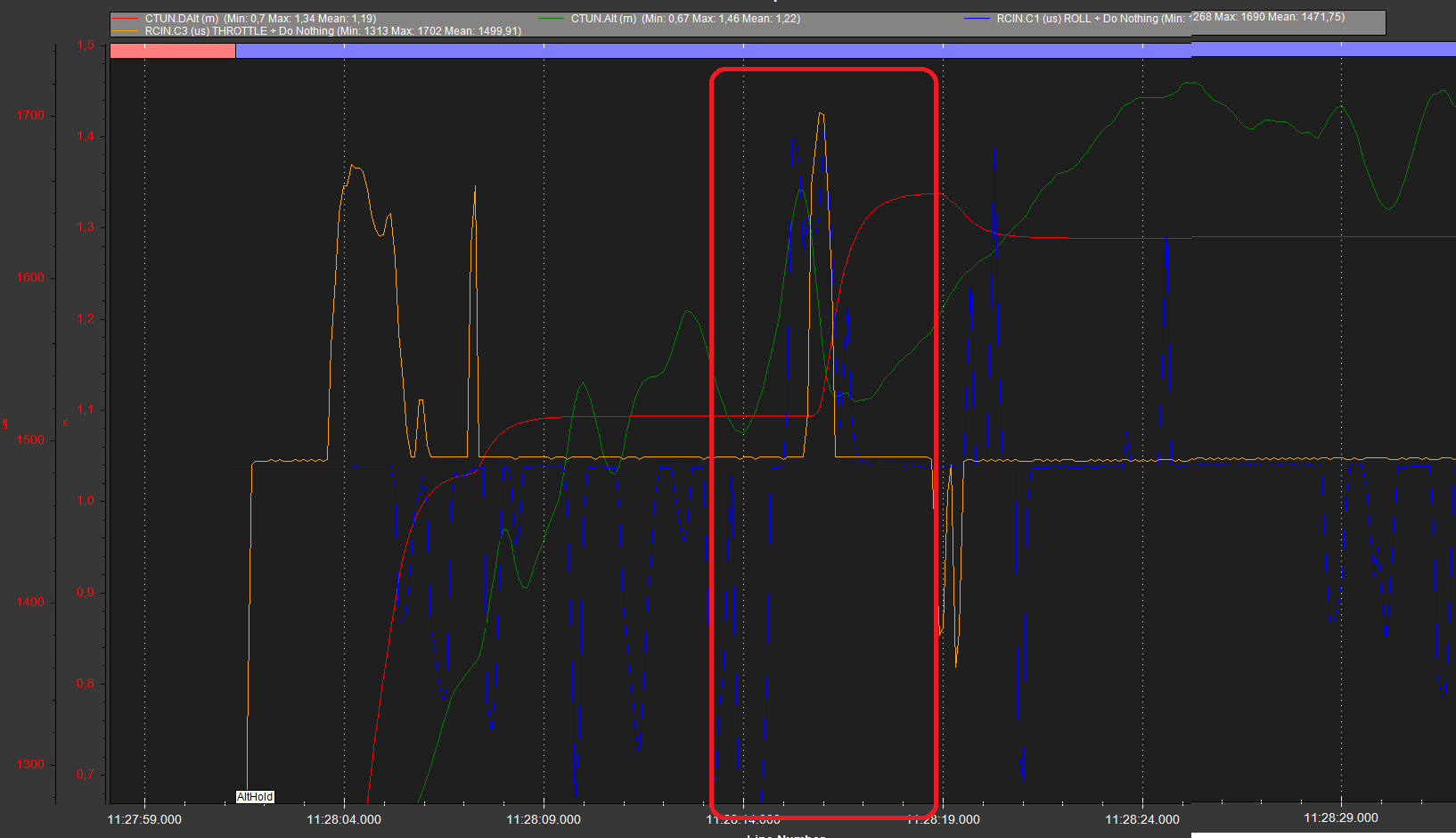
You can see here the event:
I did a hard right, and the alt went down, so I have to put the THR to gain alt again.
Furthermore, you can see the DALT is not the same the ALT…
Any idea what im doning wrong?
Here is the log.
Thanks2022-03-07 11-28-01.bin (1.0 MB)
Alvin
8 March 2022 07:18
2
Did you upload the correct log?
The roll doesn’t seem moving together with altitude. And the throttle in and out are matching well.
It may be an effect of leaning the copter divides part of the downward thrust to other direction.
Hi Alvin, thanks
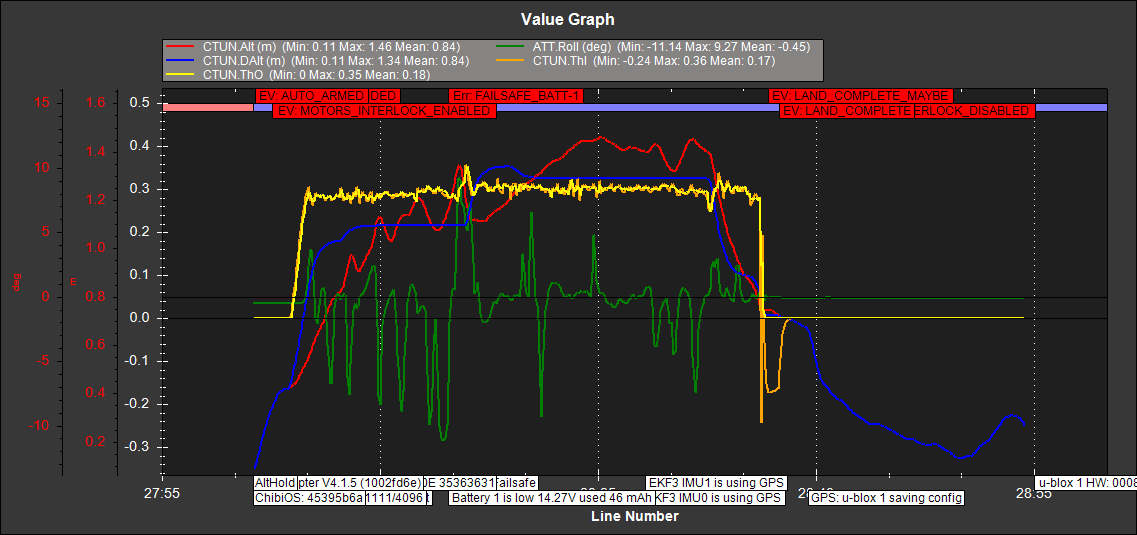
The log is correct, here you can see the problem
You can see when the roll is comanded, the alt went down, the I have to pull up ro recover some alt.
xfacta
8 March 2022 23:32
4
Tuning needs to be improved
ATC_THR_MIX_MAN,0.5
1 Like