Hello all,
I am building a quadcopter and It has been flying fine. Today I was doing a long range flight test and everything was fine until when I started to return then all of the sudden the copter started wabling then potential thrust lost then it crashed.
I dont understand the main cause. Can someone help diagnose this with the below logs?
-My motors and ESC are U8LITE-X, the KV190+ALPHA 60A LV+MF2815 30mm 1cw R, 1CCW R, 1CW G, 1CCW G
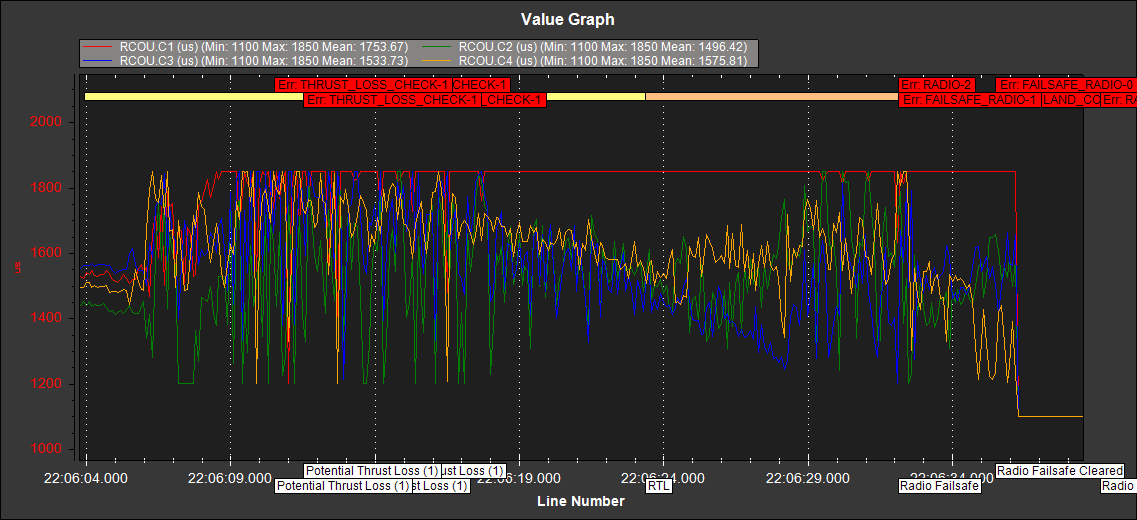
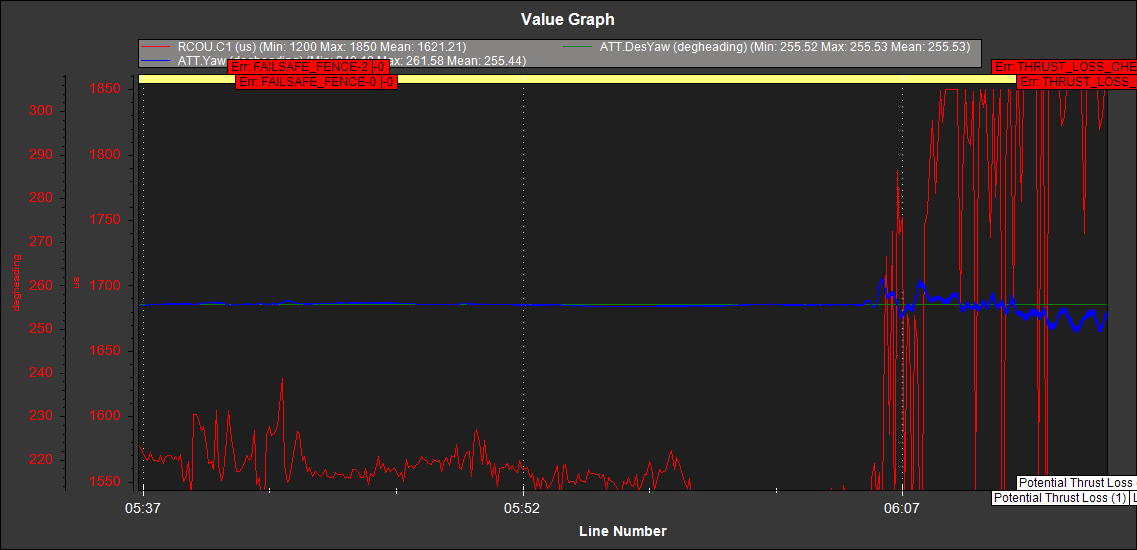
Seems to be Motor/ESC1 losing thrust and is eventually commanded to maximum. Without it working the other motors/ESCs struggle to maintain flight.
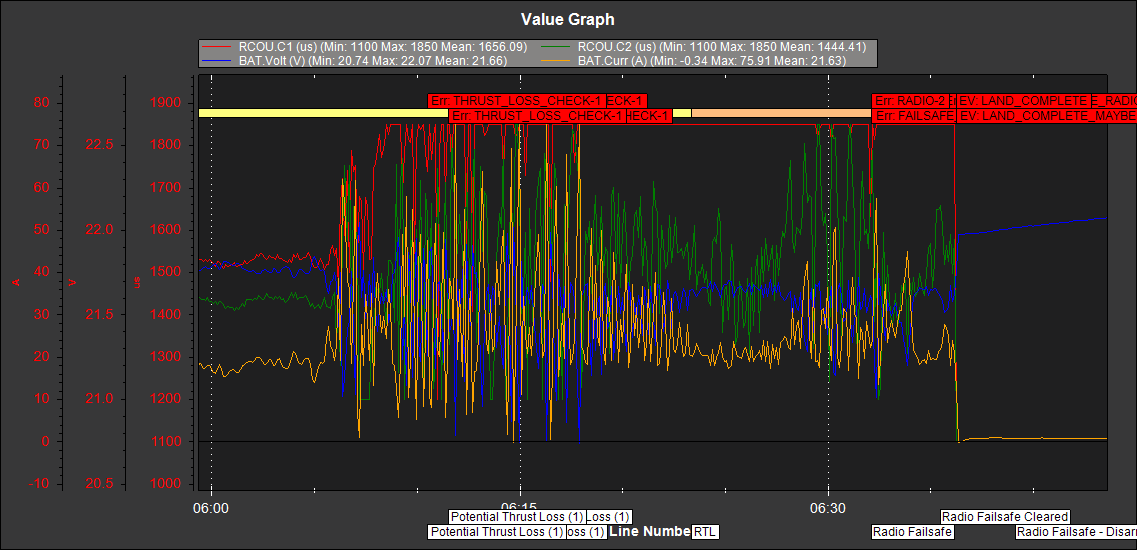
I dont see an obvious cause, like huge current spike indicating an electrical fault. My personal opinion is use different ESCs or this will happen again.
This can be told from the RCOUT. As you can see RCOU.C1 went maximum, this is a sign of ESC1/motor1 not getting enough thrust output as it should be. Thus Ardupilot tried to raise the output to regain lost thrust.