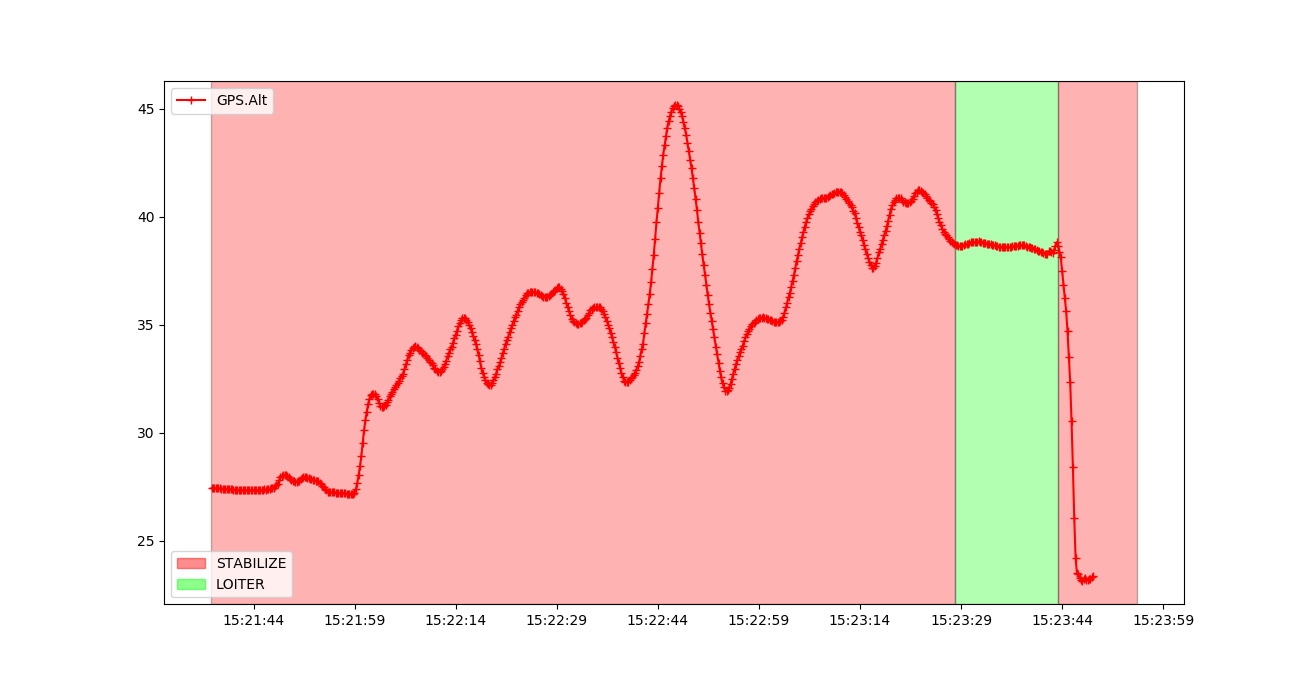
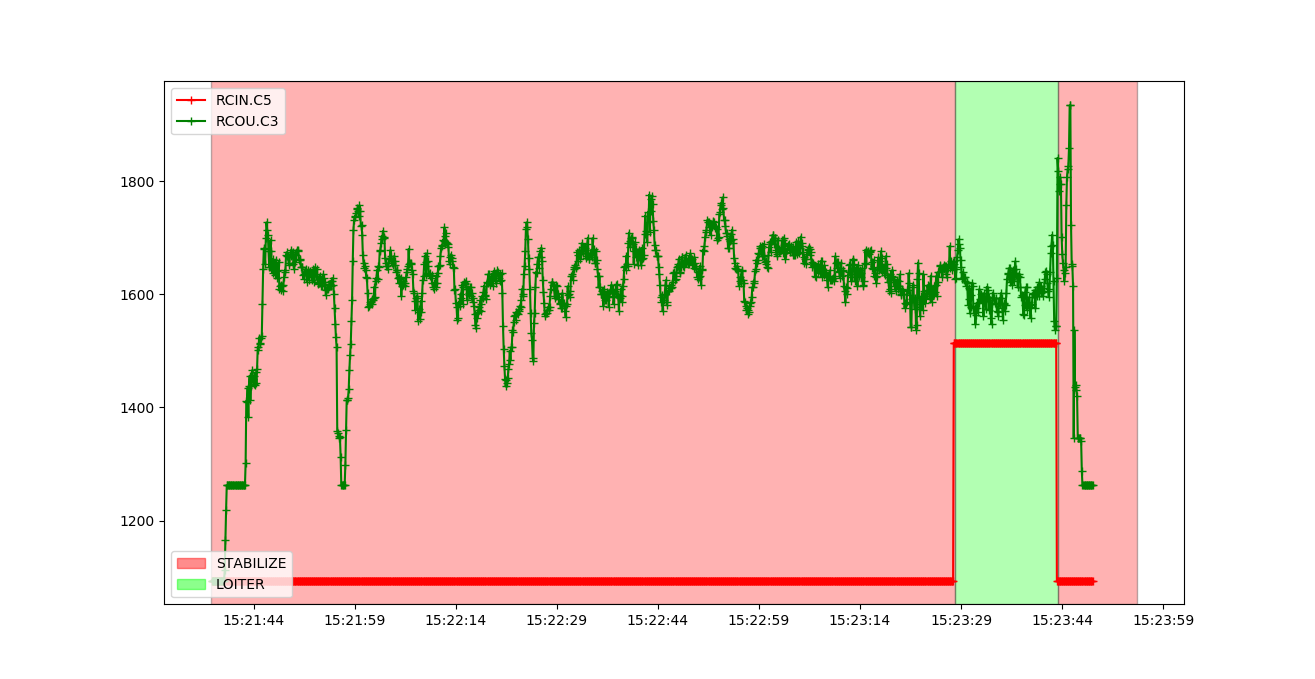
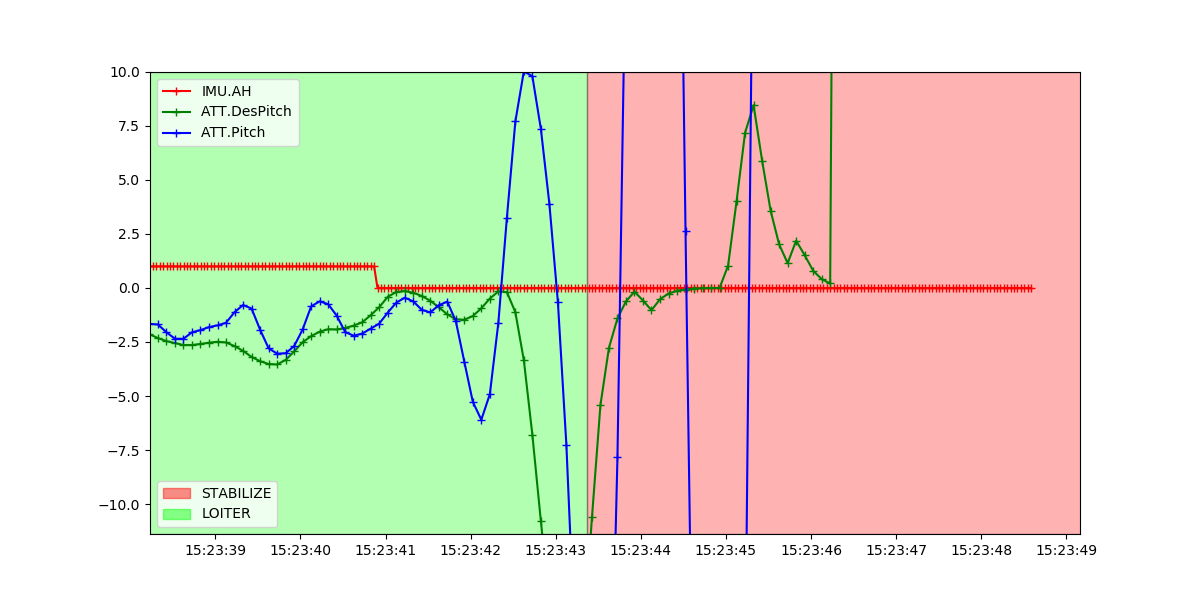
Looks like it was switched to Stabilize just before the crash.
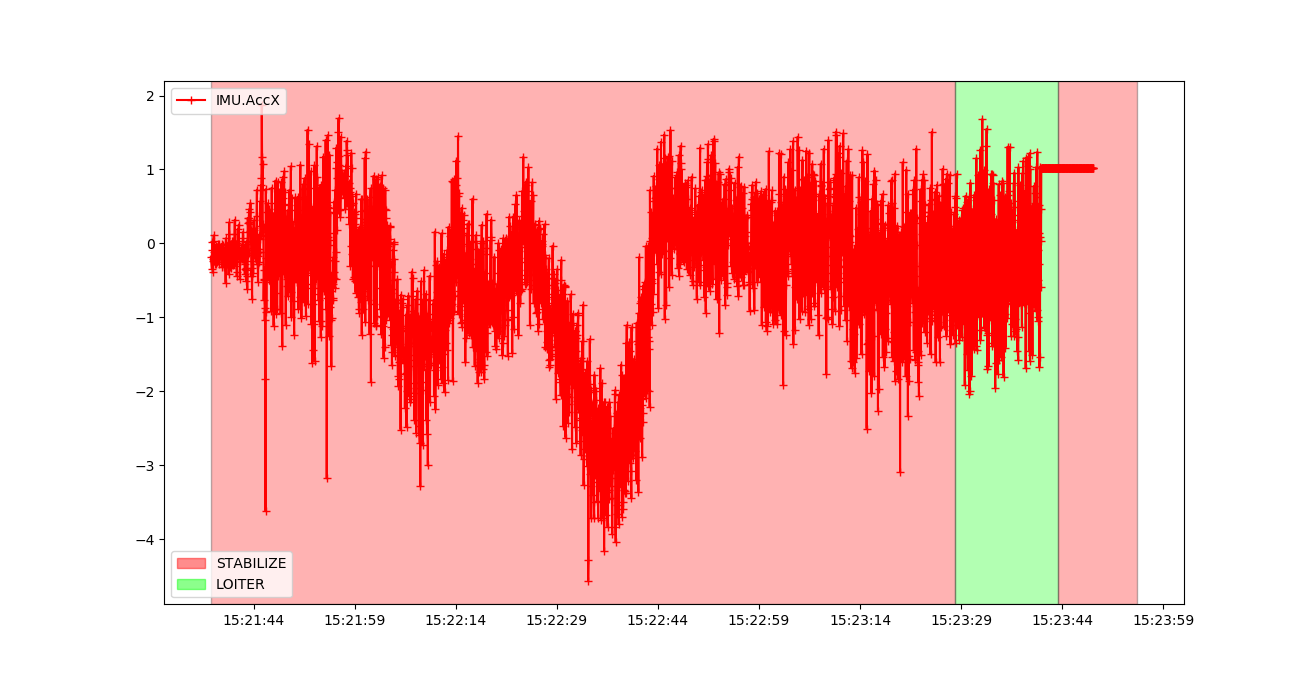
IMU seems to be acting weird just before the switch to Loiter
Is there a video of the flight ?
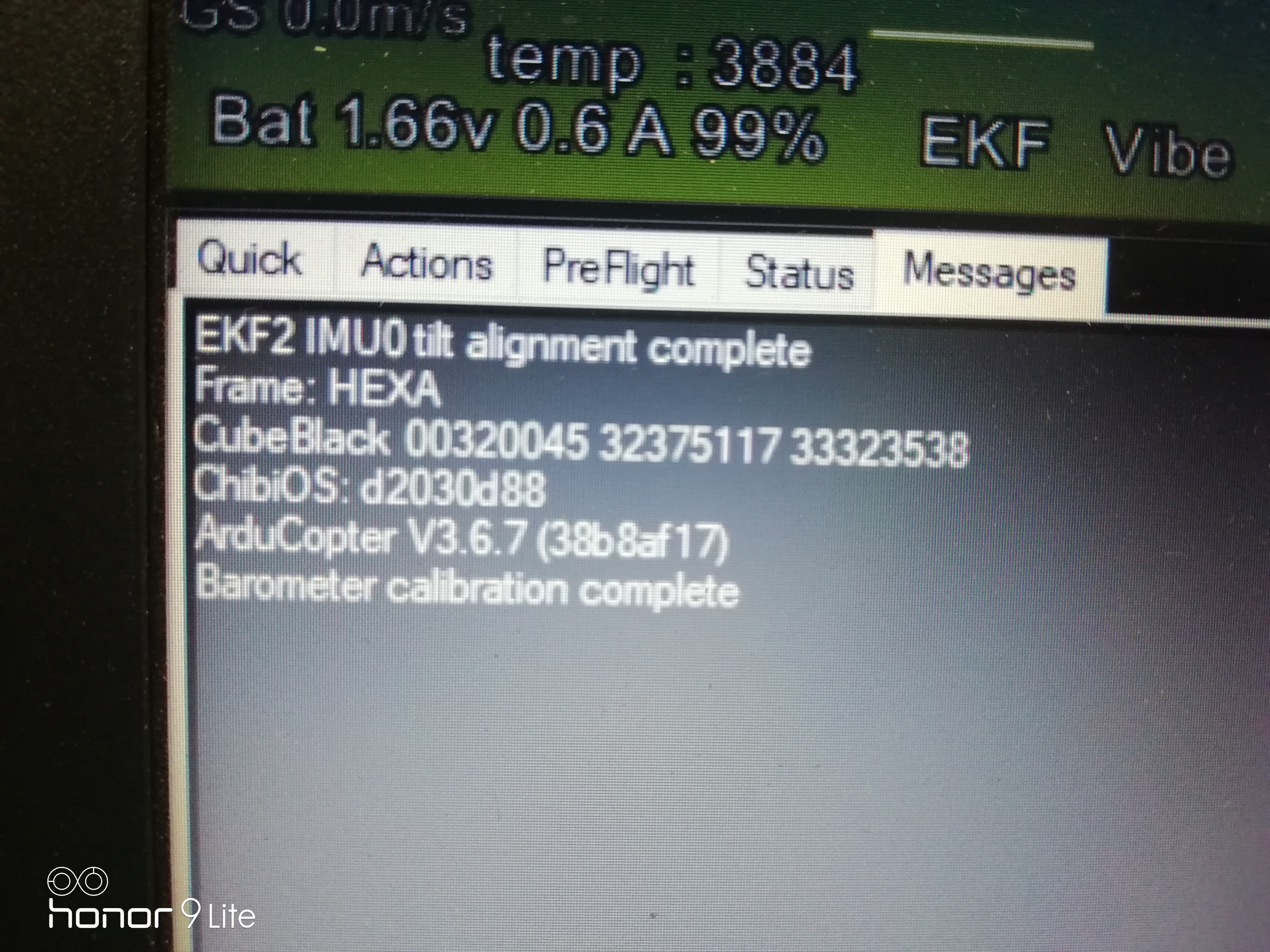
I have sent you a PM, you have unfortunately suffered an IMU failure. I am discussing with our team as to how to ensure this cannot cause a crash in the future. Something was seriously wrong even before takeoff, as only one barometer, and two IMU’s were present at takeoff. Under these circumstances, I would prefer that it would not let you take off in the first place.
It’s hardware issue or arducopter firmware issue. How should I know before takeoff all three barometer and IMU are working to prevent next future crash like this
Can you please send the cube black serial number found in the messages tab? And the serial number on the base of the cube?
(Of the one with only one IMU)