Hi there,
i´m building an quad X Octocopter with herelink and cube orange FC.
I have mounted an HERE2 GPS GNSS.
And now i´m asking what compass settings are correct in Mission Planner for this hardware configuration?
The Here2 was setted to work with CAN Bus and i´ve setted the needed uav_Can parameters in MP.
Thanks in advance!

The Here2 has 1 compass and it will be Compass 1 and external.
The CubeOrange has 1 internal compass and that will be Compass 2.
That’s not quite correct on CAN Yet.
Can will not come before internal in some case until the new firmware.
Look under the device ID section and see what it’s set the CAN too. Looking at that it’s Mag 3 so set that as primary.
In the upcoming releases this is all being massively improved as CAN has had a few quirks.
thank you for your help.
I´ve looked in the device ID section and under no. 3 i didn´t see nothing, is that OK so?
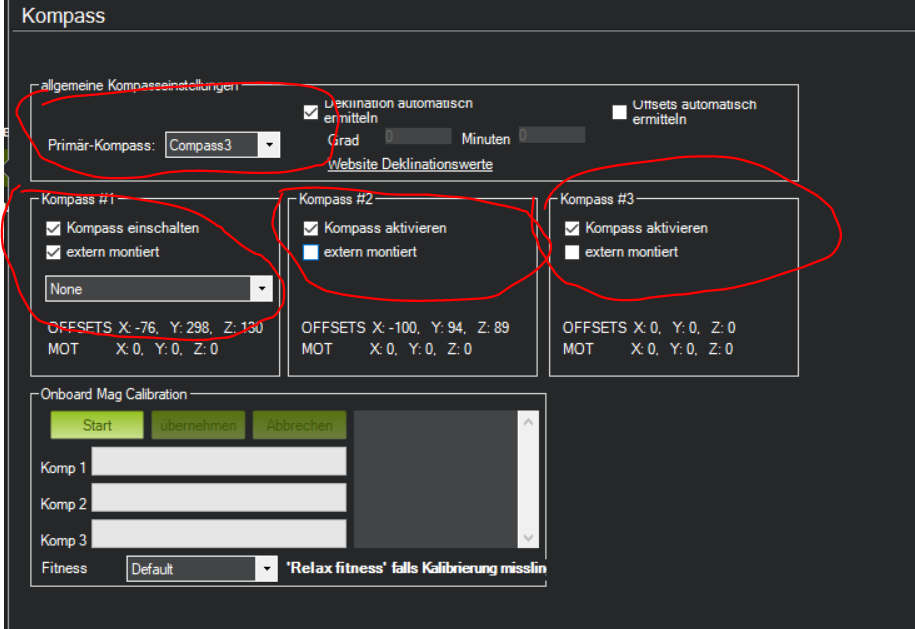
You need to disable compass 3 as according to that there is not one.
Can you post a full screenshot of the device I’d screen