Setup: KDE servos. Servo Rail is powered by a Mauch 5.35VDC DC-DC Regulator. I have Main Power Brick, Backup Power Brick, and servo. All Powered by Mauch Power supplies. Most connections are soldered. The rest are Nice and Tight XT60s. In my timeline: the craft freaked out at about 13:51:22, and crashed into the pond at 13:51:28
Here is a link to the footage of the failure: Dropbox - Sullivan_Motor_out_crash(2).mp4 - Simplify your life
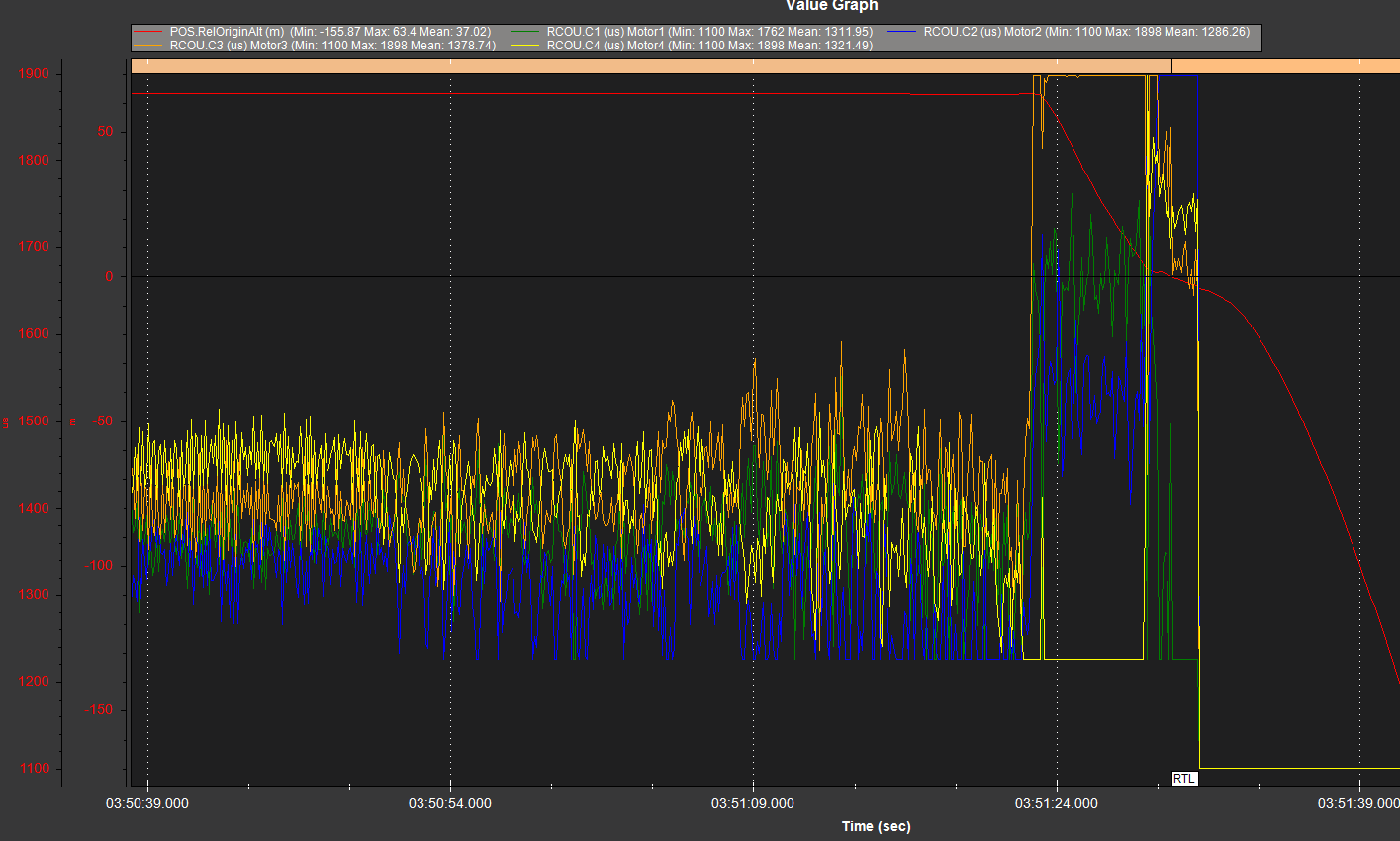
Yes, I’d agree with that - Motor3 commanded to maximum since it stopped producing thrust, Motor4 commanded to minimum to compensate.
Then Motor2 is commanded to maximum since it stopped producing thrust, Motor1 commanded to minimum to compensate - Motor 3 and 4 are working normally again but not enough to save the craft.
MOT_SPIN_MIN and MOT_SPIN_ARM need to be a bit lower, or add dummy payload.
HNOTCH settings have a few things wrong, this could be causing PIDs to be less than ideal if you ran autotune with those HNOTCH settings. Although attitude control was very good up until those thrust loss issues, so PIDs must be quite OK.
Let us know if this quad or its replacement get’s back in action and we can check a few things to aid tuning.
Thank you. I wonder if the ESC for Motor 3 rebooted. I replaced the ESCs with some APD 200A F3 units. I will command them with DSHOT 150. These 2 factors may help prevent a Motor 3 out, but I cannot be certain. Thoughts?
I think DSHOT300 was the minimum for those APDs but I could easily be wrong. Either way DSHOT300 is good, DSHOT150 is good if it works, and going to 600 is not required from a performance point of view.
Shawn, I will flash the APDs to the factory firmware, set up the four ESCs as DSHOT300 on Aux pins 2-5 on the Cube Orange, and see how things go. Sound like a good direction to give a go at?

Ensure those power connectors are very tight fitting.
I certainly will.