I think to be ready to test my CUBE Organe, my first installation on a large quad with 18" props and 490kv motors at 6S. Can you please give me a suggestion about the standard PIDs to start to work on it? Before autotune while flying i need to take off with a standard pids values and then i will do autotune!
Use lowest take-off weight, dont have any payloads or camera/gimbals fitted.
Do all the mandatory calibrations of course, then set up you voltage and current monitoring.
Enable Fence
Use Mission Planner, Mandatory…, Initial Parameters, accept all it offers.
Set INS_LOG_BAT_MASK,7 to gather data for Harmonic Notch Filter
Take off using Stabilize and AltHold only until further testing, later you can use Loiter
If everything goes OK do some hovering and gentle movements
Put a .bin log file here for us to check.
We can help you configure the Harmonic Notch Filter
Then you can run Autotune
Once everything is working perfectly and tuning is all done, you can adjust these accel values to suit your payload:
new ATC_ACCEL_P_MAX = ATC_ACCEL_P_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_R_MAX = ATC_ACCEL_R_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_Y_MAX = ATC_ACCEL_Y_MAX x (min_TOW / max_TOW)
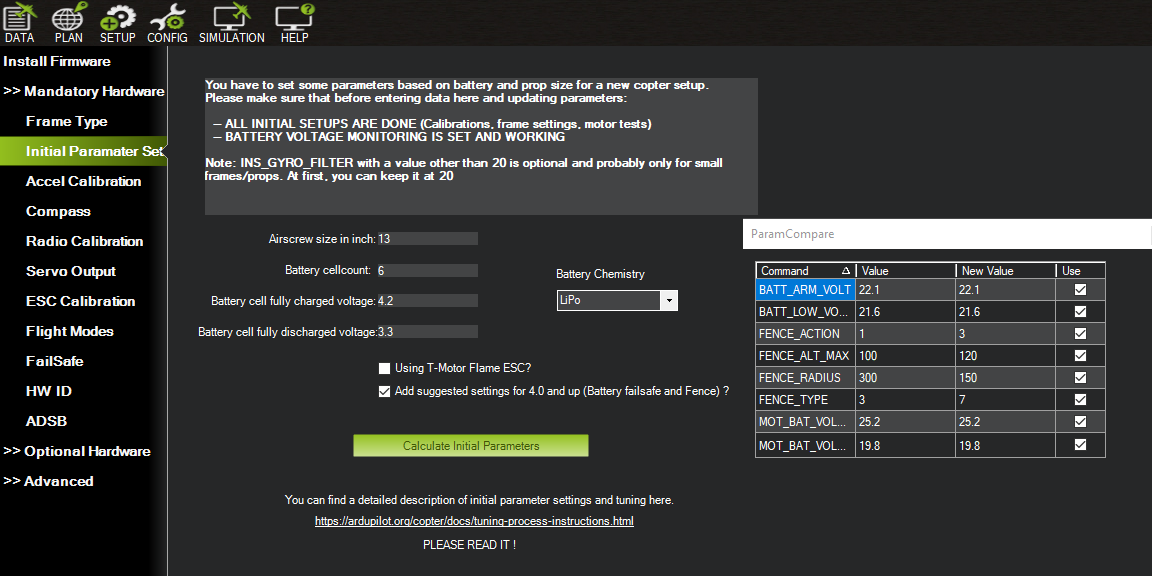
ok thannks, i tried to fill the “initial parameters” for example the default values for the props are 9, if i fill 18 (my props are bigger), the software don’t record this new parameter, even if i press “Calculate initial parameters” and i press always OK, why?? Even for the cells numbers, is always at 4 but i need to fill 6
You should get a ParamCompare window pop up with the new values, and it shows you the old/existing values as a comparison.
You should also choose the “Add suggested…” check box - everyone should in almost all cases.
and at the bottom of that you click on “Write to FC”
You have the chance to deselect some params, or just close the window and not write any new params
The new params get written to the flight controller - each time you start the Initial Param calculator, it starts with default values, it doesnt read your existing values first.
Ok thanks, i followed your instructions, i wrote to FC, and i flagged the “add suggested settings…” and now when i open again the software i see always the 9" props and 4s cells! Why starts with default paramenters and don’t read my last settings?
As I said, the config screen starts with its default settings, it does not read your existing settings. The existing settings would be shown in the Compare screen.
You only need to run it once.
2022-08-20 17-54-42.bin (1.3 MB)
This is a small log file downloaded, i would like to post another log wich is bigger but i can’t do it…Can you please help me to understand how to improve the flying of this drone? It’s too difficult to keep in in the air…i tried Altitude and Stabilized and no change…it’s really hard! Even the Loiter…
Large logs an be uploaded to any reasonable file sharing site of your choosing, such as Dropbox, and then you post a link here.
I would change these parameters
BATT_FS_CRT_ACT,1
BATT_LOW_VOLT,21.6
FENCE_ENABLE,1
FENCE_TYPE,3
And put these in for now, they will need some adjusting later
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.2
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
INS_HNTCH_ATT,40
With such short busts of throttle, there is no useful data to go on.
Are you able to raise the throttle very slowly? There is only large very short bursts of throttle in this log.
Do all your motors always spin up OK just with arming? (before you apply throttle)
You will have to try for a smooth takeoff to at least 1m or 2m height and just hover for a while, maybe some very small pitch and roll stick inputs if everything is going well.
EDIT: be aware that setting the Fence as I highly recommend will prevent you from arming in any mode until there is a valid GPS 3D Fix. It can take some time, but you dont want to be rushing anything when your quad has 18 inch props. You dont want this thing flying off to the Sea of Japan instead of the home position.
thanks, but the thottle problem is caused because the drone don’t remain stable in the air and i have to give throttle to keep it! anyway, FENCE was at 0 because i don’t have props during my tests…