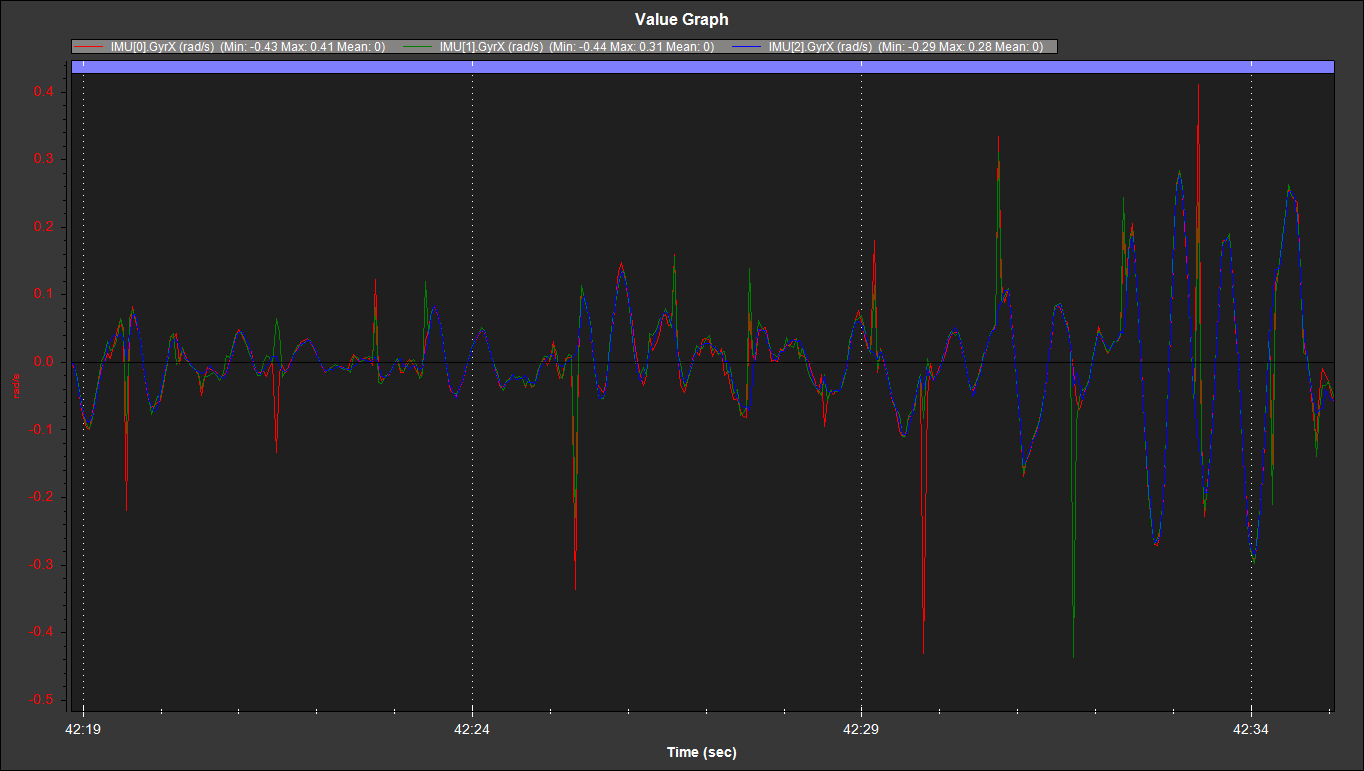
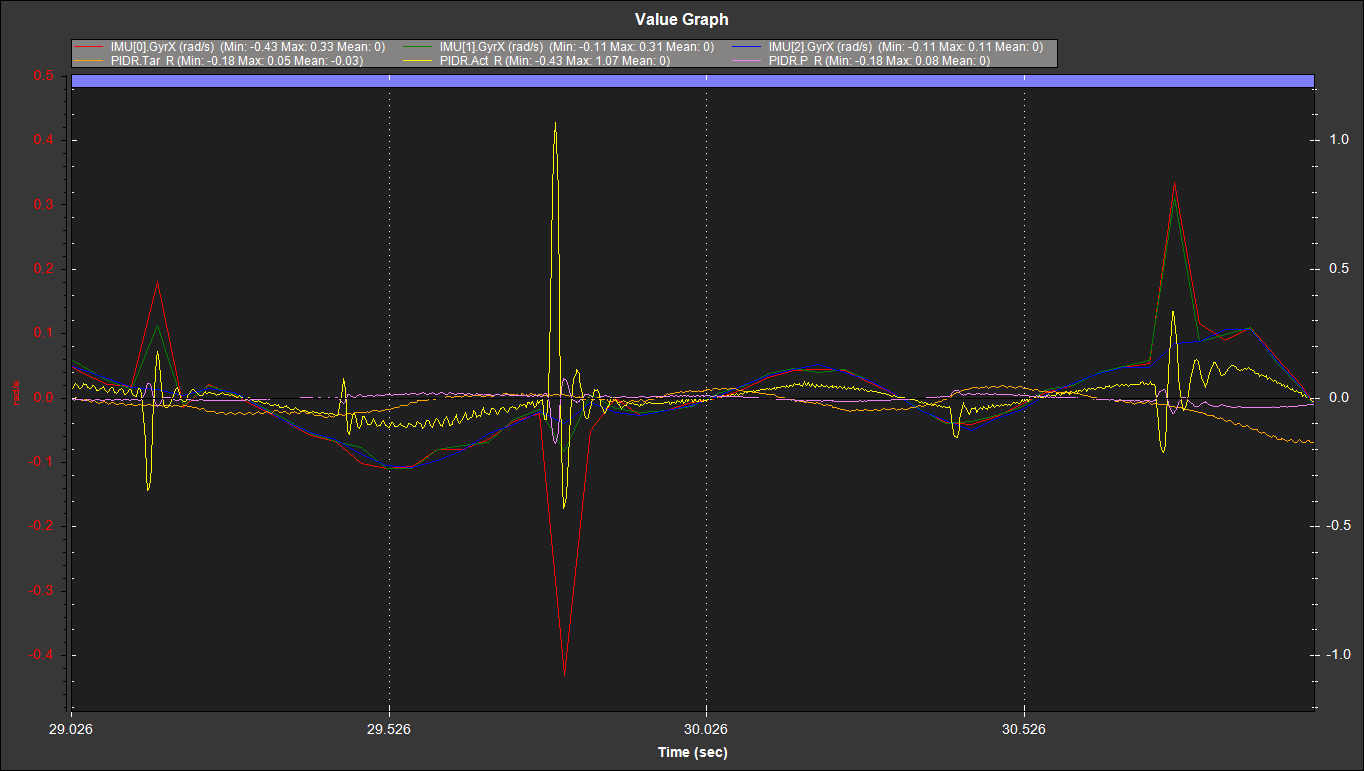
I’ve experienced a twitching behaviour in flight, that I suspect the cause comes from inconsistent/erratic gyro reading. It is running a CubeOrange with stand carrier board, mounted on anti-vibration mount. I have just started tuning the vehicle so tune isn’t great, but this does not seem like a tuning issue as gyro reading have random spikes and PID gains are attempting to correct the ‘error’, as well as desired rate did not command the twitch. Previously seen similar type issue related to internal hardware build, wonder if it is the same case here.
Could it be caused by ground shift on the motor signal as I found the I2C 5V and GND wire terminations were not fully insulated? Though the carbon fibre frame is tested to be non conductive.
The same 6 motors & ESCs were used on another vehicle with no problem, so suspect cause is upstream.
Anti-vibration mount is bobbin rubber mount, not the ball type.