We would like to introduce to the community the Cube Ecosystem.
The Cube may be the heart of your Unmanned System, but without the peripherals, you cannot fly.
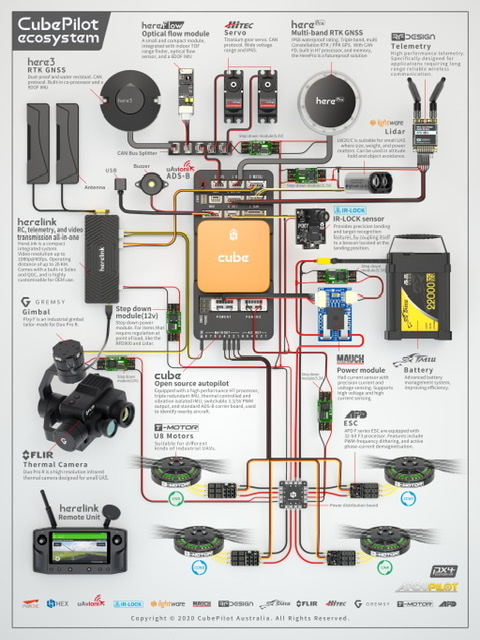
We receive frequent questions asking what we would recommend if we were building our own aircraft. So rather than just answering each question, the amazing team at CubePilot marketing has made this Ecosystem Schematic, to show you all what goes where.
We hope this poster will give a clear path forward for those looking to build their next vehicle.
Why a separate telenetry RFD900 when herelink can provide the telemetry? If it is for longer range then will there have to be another RFD900 connected to the laptop and one can see telemetry data on laptop in Mission Planner?
No gps is connected in the dedicated gps port but in the CAN1 and CAN2. And GPS 2 port is engaged in Lidar instead of GPS, i am confused
Isnt it better and give stable results if one uses dedicated gps ports for connecting gps? And leave the CAN bus for other sensors?
It seems like any thing can be connected to anyport (regarless of their purpose) as long as the connector fits in the port, obviously i am wrong plz guide.
Sorry for too many questions
The GPS 2 Port is simply a UART. It can be used for any devices.
The original GPS 1 and 2 ports were for serial devices when there was no CAN
CAN is the future and moving all sensor over to it is the best way forward. The old ports remain but Can be now repurposed for other uses.
As for the radio this is not a demo setup but a overview of the kinds of devices that can be used and are compatible from an large variety of partners. It’s showing you what can be done not the best way to do it.