Hello everyone!
We have transformed a Joyance drone to an ArduPilot platform. We are using an Orange Cube, plenty of power, etc. The usual setup.
We are using the same ESCs, motors, propellers, power battery, and wiring that the drone originally had.
We were successful, and the drone flies pretty well.
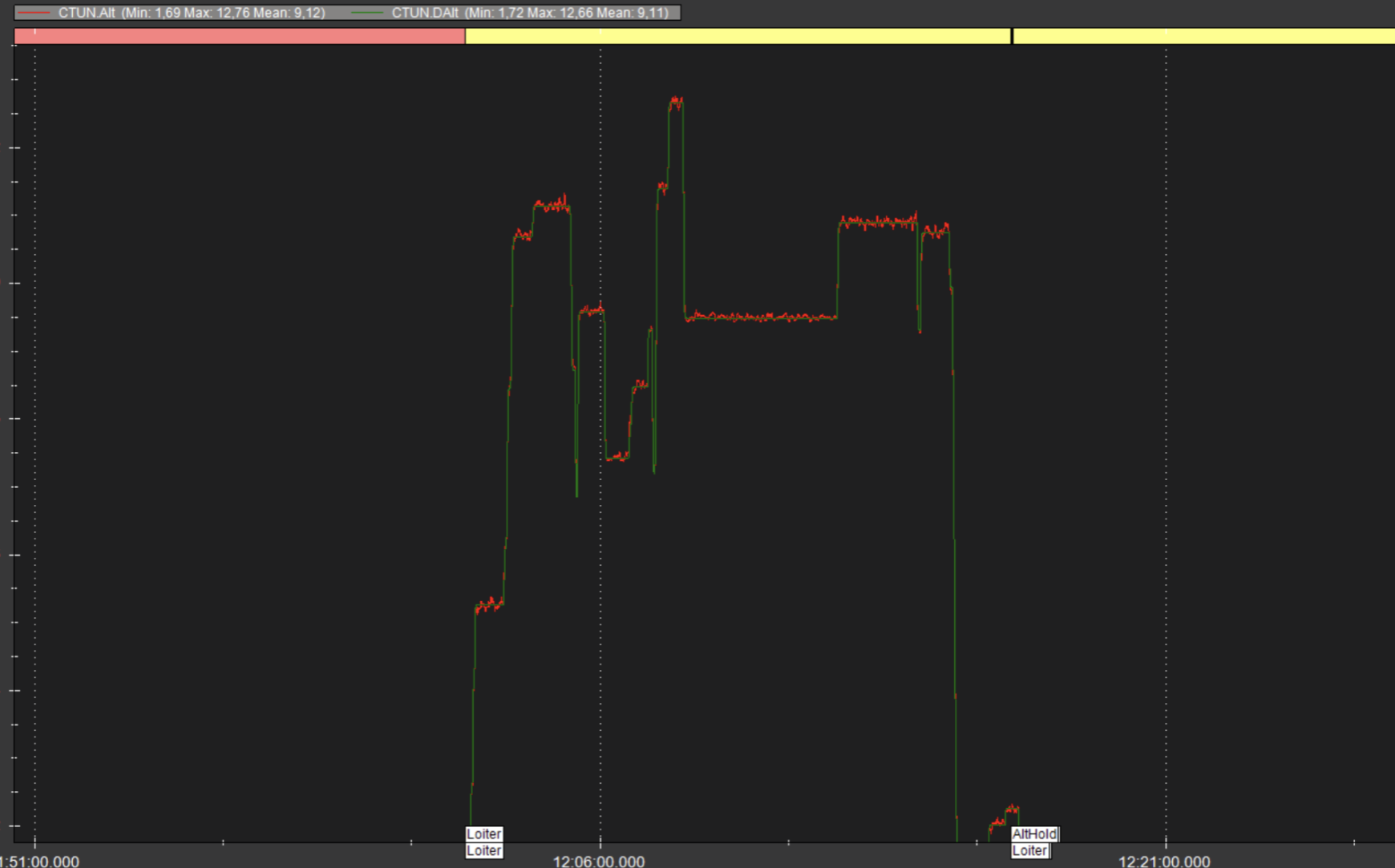
However, we have an issue: the drone can’t maintain a constant altitude. If you leave the drone with no input, it keeps going up and down—sometimes a few centimeters, sometimes at least 1 meter.
For example, I can see the drone going up while the barometric altitude is going down.
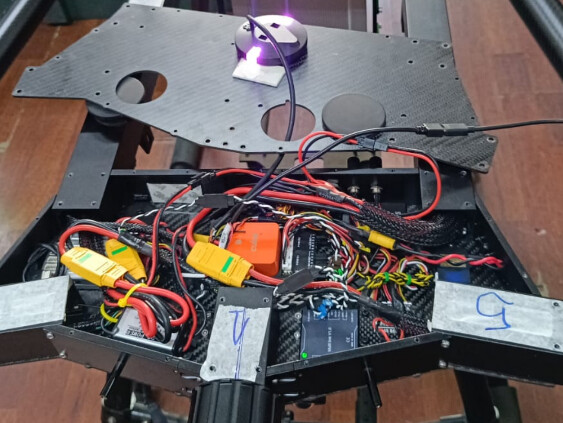
Here is a picture of the flight controller installation. The FC is inside the frame, with no wind inside.
Here is a fast-forward video where you can see what is happening, with no RC input.

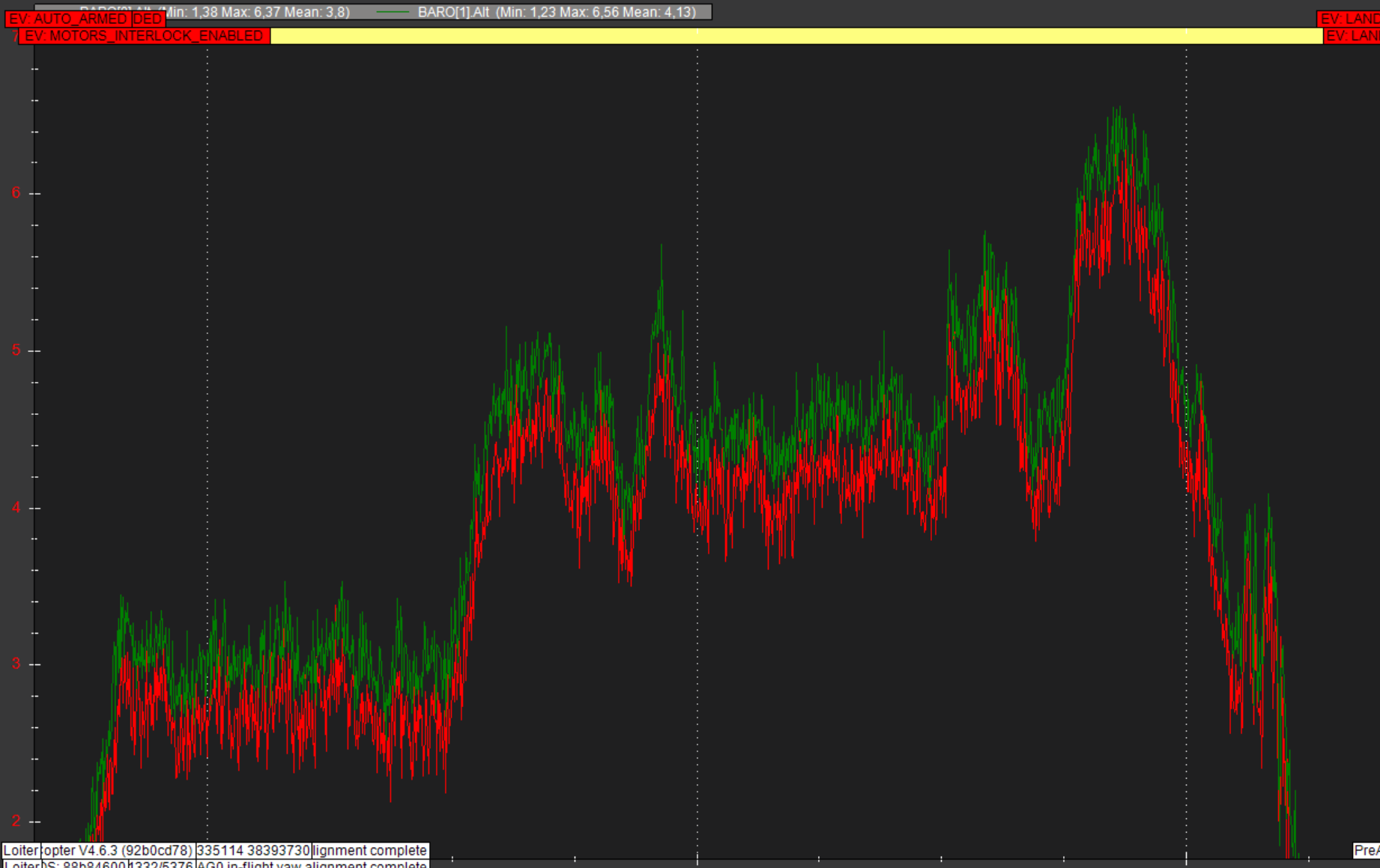
I was checking the logs, and I can see that one of the barometers is a bit noisy compared to the other.

The altitude is reached easily, but it is still quite noisy
I have been working on the vertical acceleration tuning, but I can’t get the drone to hold its altitude.
Is it possible that the barometers are not working properly?
I hope you can help me. Thanks.
Here are two logs.
Thanks!