When flying with a downfacing range finder, I often don’t want use terrain following when flying above a certain altitude. For example: I don’t want the drone to have terrain following when flying 20 meter above trees, but I do like to have terrain following activated when landing. As far as I know, there is no parameter (or another way) to achieve this, so I would like to add this feature to the Ardupilot code.
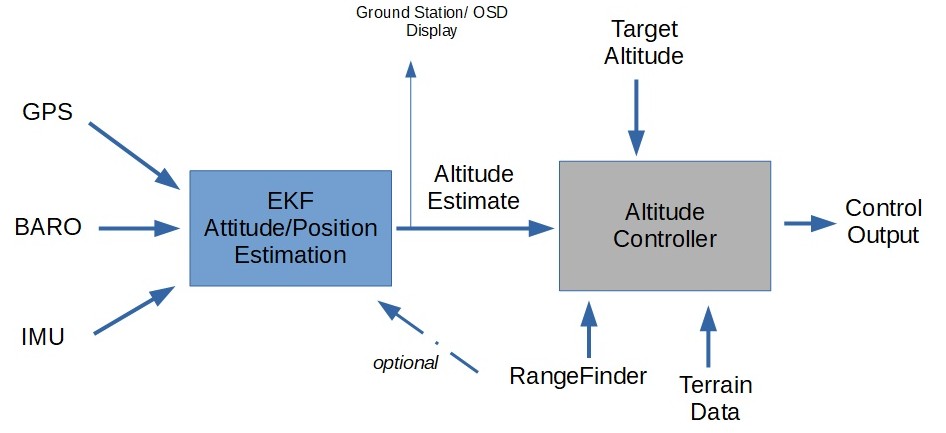
I would like to add a parameter for each range finder that specifies the height at which the range finder turns off. As the height source I would like to use “Altitude Estimate” as shown below.
I obviously don’t want to make a mess of the range finder code that already exists, so I’m wondering if someone could quickly tell me where this feature could be best programmed.
In Ardupilot there is RNGFNDx_MAX_CM to set the upper limit, usually dictated by the rangefinders properties. And you can set an RC channel to enable or disable the rangefinder: RCx_OPTION,10
I’m using Ardupilot.
Setting RNGFNDx_MAX_CM doesn’t work very well (e.g. RNGFNDx_MAX_CM = 2000 and you are flying at 22 meters altitude. The drone will still climb in this case if you encounter a tree higher than 2 meters). RCx_OPTION = 10 is a good solution, but in my opinion, it would be even handier if the drone takes care of this automatically.
I have also considerded to use a LUA script (this is possible too), but it might be better to implement this directly into the C++ firmware.