@益德_廖 can you save parameters from mission planner for Cube and GPS and share it with me? Also can you share the firmware version running on HerePro, you can check them from DroneCAN/UAVCAN tabe under Setup > Optional Hardware. Also save the parameters from HerePros and share as well.
I have the same issue, and have been struggling with it for a week with no luck. I am running a Cube Blue with ArduCopter firmware V 4.5.1, and two HerePros which are running the latest firmware, V 1.13.BF5E50D8 and are HW version 4.13.
The Ardu parameters have been set per the recommendations in the HerePro Manual and in the Ardupilot.org Docs GPS for Yaw (aka Moving Baseline) - Copter documentation. The HerePros are 0.567 meters apart, with the #1 unit Y-axis position set to -0.244 m and the #2 unit’s Y-axis position set to 0.323 m in the Ardupilot parameters.
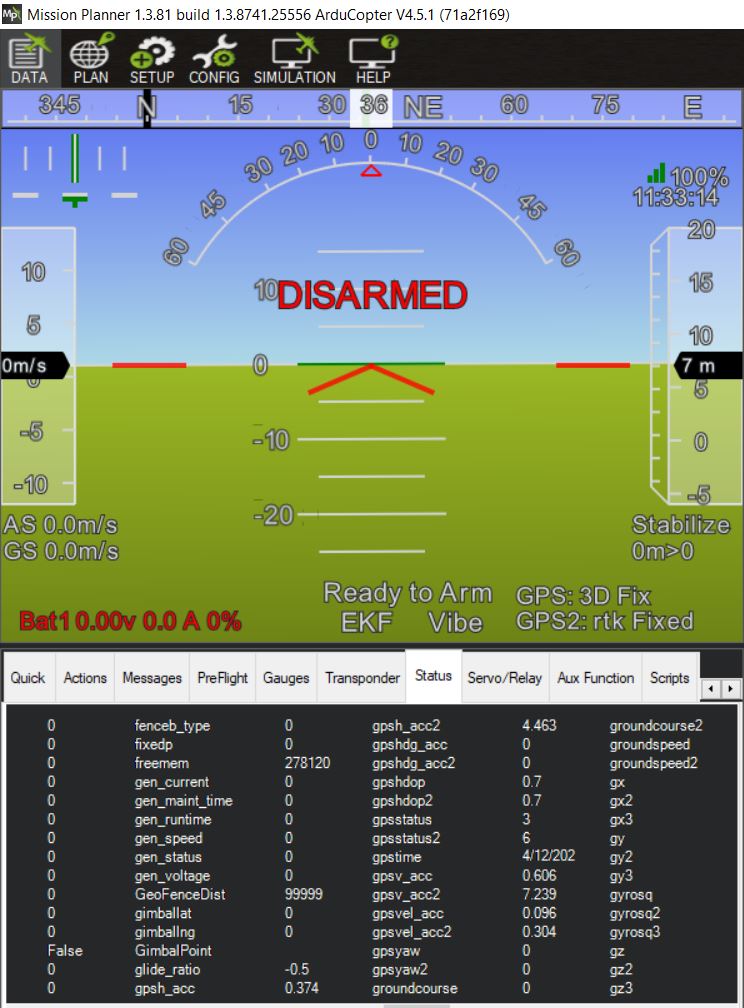
The gpsyaw and gpsyaw2 values are always 0, and do not change when the test setup is rotated. The PFD window indicates GPS1: 3D Fix and GPS2: rtk Fixed.
The attached zip file includes the parameter files for the Cube and the two HerePros.
Thanks for pointing that out, I will update that parameter. The intention was to have both GPS_POS1_Z and GPS_POS2_Z set to 0, as my test setup has the HerePros at the same vertical position as the Cube.
As a follow-up, setting the GPS 1 and GPS 2 positions to accurately reflect the locations and spacing relative to the Cube has no effect on the ability of the system to provide a GPS-based Yaw estimate,
I find it frustrating that the Cubepilot and Ardupilot documentation claims the ability to provide GPS Yaw heading, but using the claimed firmware versions for each device, and following the recommended parameter settings results in nothing more than RTK operation. Even including system movement over > 1m does not result in a gpsyaw other than 0, nor an indicated heading based on the positions of the GPS units.
Has anyone in the Cubepilot community ever successfully obtained GPS Yaw heading without writing custom software to independently process the GPS data???
I have attempted to use the Here4 as well as the HerePro, and neither ones provide the functionality, even when the firmware versions, hardware versions, and paremeters are updated to the “recommended” values.