DRONE WAS IN AUTO MISSION HAS DONE 2 LINES BUT IMMEDIATELY FELL DOWN .
KINDLY REVIEW FILE
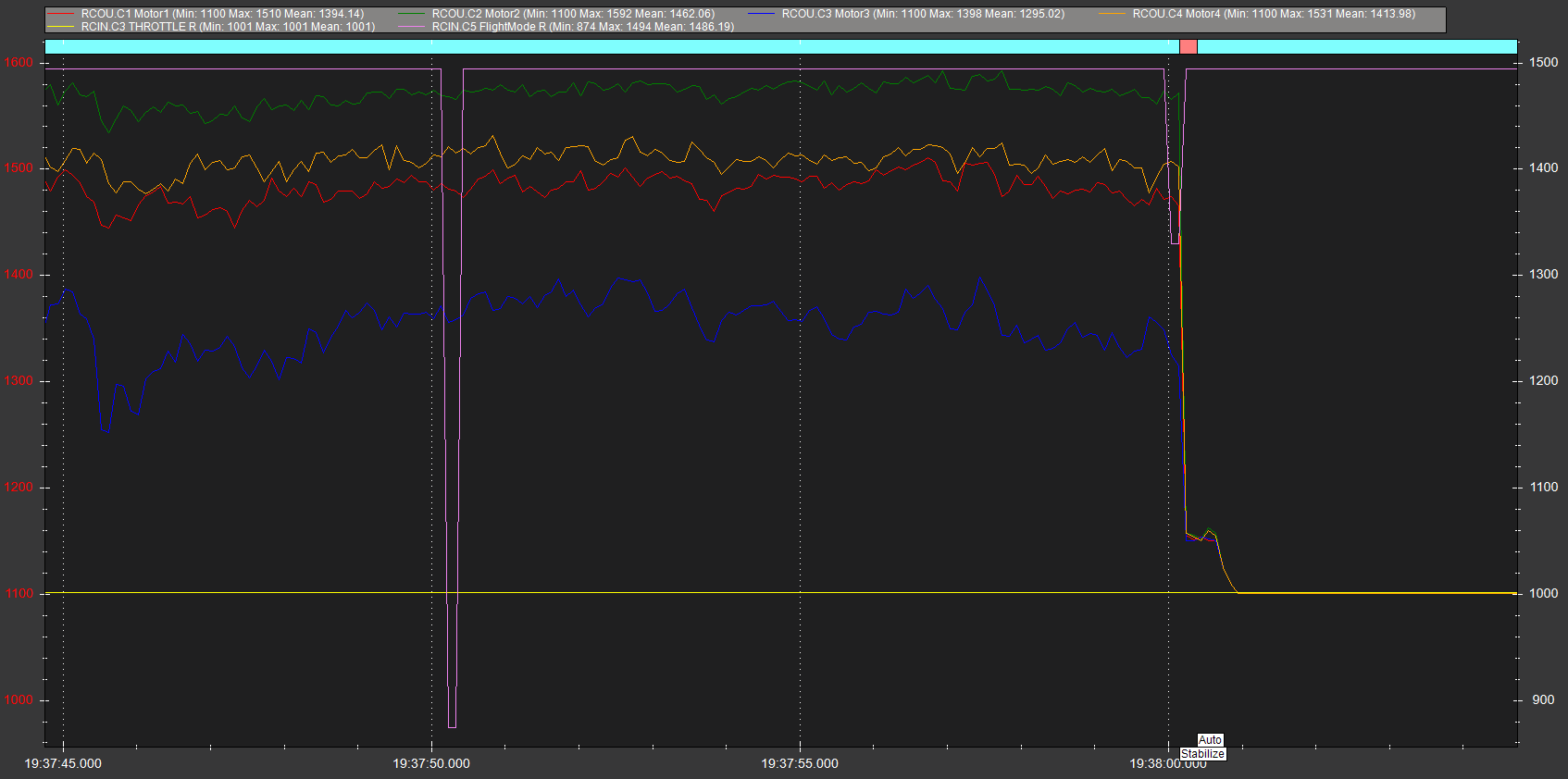
Throttle
The actual cause!
The transmitter flight mode channel briefly switched to Stabilise mode.
Since throttle was at minimum for the whole flight, this particular mode change caused the copter to disarm and fall like a stone.
Even though the mode was switched back to Auto, the copter did not resume flying because it already disarmed.
Also note the transmitter flight mode channel also briefly changed earlier in the flight, but it had no effect.
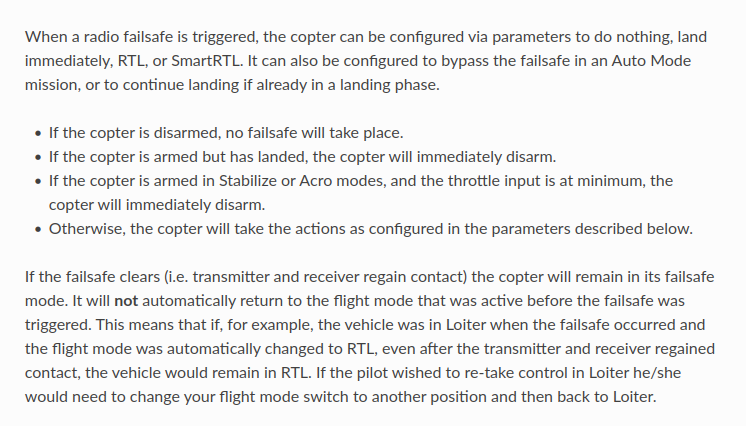
The documentation actually says that selecting Stabilise mode while at minimum throttle will cause the copter to disarm immediately if the copter was armed in Stabilise mode.
It is covered in the RC Failsafe section, so it can be a bit hard to find and equate to flying with a non-spring-centred throttle.
My advice
All multirotors (except small acro quads) should have a spring-centred throttle!
This helps with unexpected mode changes and general safety - you can quite easily hand the transmitter to another person safe in the knowledge the throttle is at hover value.
If something goes wrong you can just let go of the sticks, they centre and the copter should hover.
You can also set PILOT_THR_BHV,7
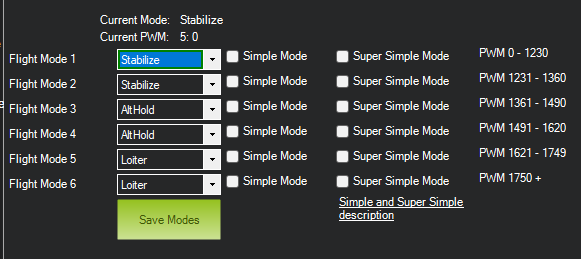
You probably have a 3 position switch for flight modes - use Stabilise, AltHold and Loiter (as you have)
but also in the copter set every available flight mode position to a valid flight mode so even if the transmitter PWM goes a bit strange you still have a good chance of achieving the desired flight mode.
The Arducopter version
ArduCopter V3.6.9 (632be63f)
Since v3.6.9 there has been critical fixes plus important fixes and many feature updates.
When you have fixed any damage, load the latest stable firmware, reset all to defaults and redo all mandatory calibrations and tuning. This should be relatively easy since you had many default values before.
I can help you through that process too - when you are ready, start a new thread for the tuning before you try to fly the copter.
EDIT:
Just adding this bit since it has come up before: if “throttle below failsafe triggers” RC failsafe even in Stabilise or Acro mode, the copter DOES NOT disarm, the RC Failsafe takes precedence and the copter starts the failsafe action such as RTL.
1 Like
I like that centre spring advice, I have never thought of it like that.