I’m Karthik. We are currently working with an ArduPilot firmware–based controller. We have configured it as per our previous drone models, which were successfully built using ArduPilot firmware with the Cube Orange flight controller.
At present, we are facing an issue where the drone is not taking off even when 100% throttle is applied. Occasionally, it also crashes. We are unable to identify the root cause of this problem.
For your reference, we have attached the flight log. Kindly review it and provide your valuable suggestions to help us resolve this issue and move forward.
Thank you in advance for your support and assistance.
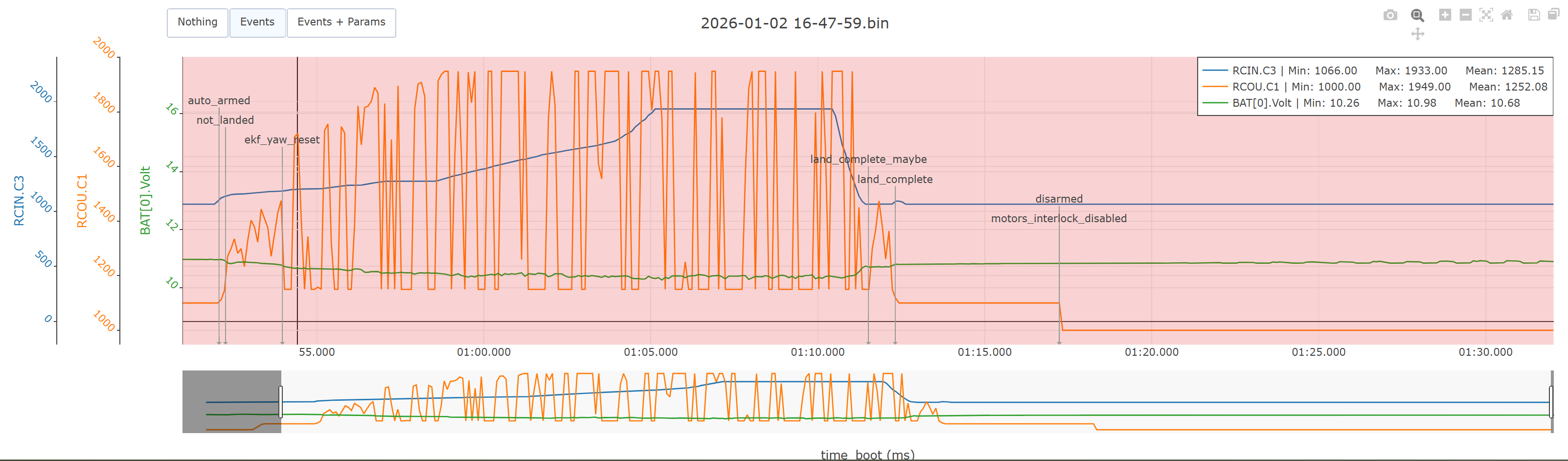
There is something fishy in your setup. Do the motors even spin up when armed? It doesn’t look like it! The RC channels transfer the necessary PWM to the ESCs, but there is no voltage drop (and it doesn’t look like you have a current sensor).
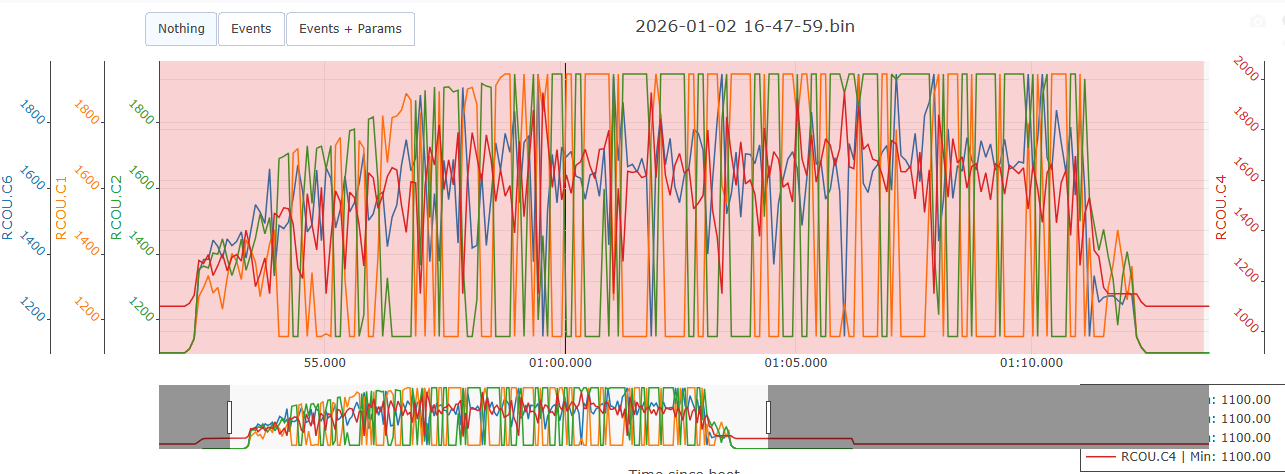
Hello, first of all, why have you use the Servo 6 for motor 3?? The Servo3 its suppose to drive the motor. Is not wrong, but you are aware of that?
Then, I can see there is something strange in the motor 1 and 2, both are going to max, but no the 3 and 4. Are they the same the same motors, props and ESC for each arm??
Did you calibrate your ESC?
Are you sure your motor and prop configuration can handle the drone weight?