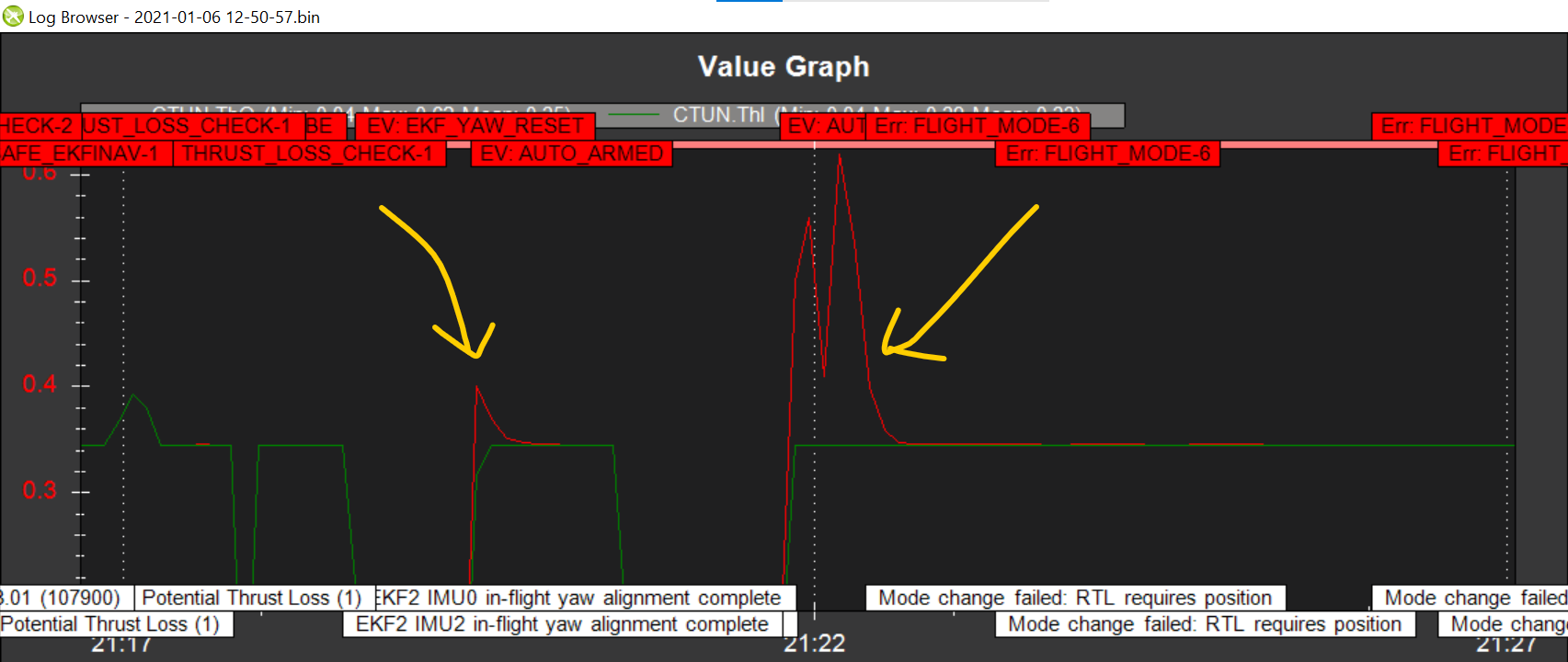
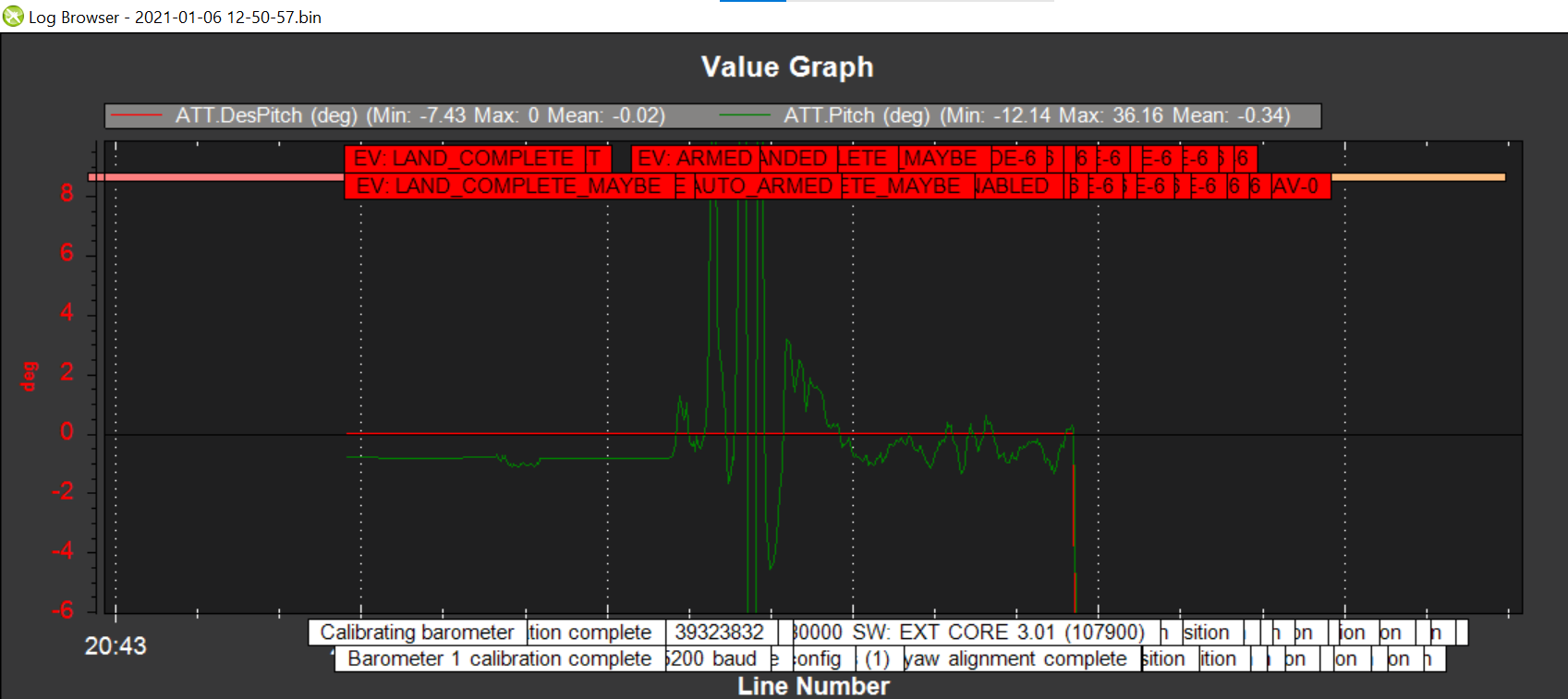
Desired attitude and achieved attitude are also inconsistent.
It doesn’t look like any thing (eg: incorrect input) command you drone to crash. It could be any other hardware failure. You don’t have any voltage/current sensor so I can’t tell if there was any high power device failed.
Before I fly a new or updated drone I check without props whether the copter behaves as expected. If you tilt it around you can see very well if the motors etc. work well or if there is something wrong.
Yes, exactly. And I think that issues (such as uncontrollable thrust caused by wrong configuration) would most likely be visible during a check without props.
Issues caused by vibration and bad construction will of cause need other tests. Guessing from the video I think part of the issues are related to the string attached to the copter. I think it is far to long (the copter already gained enough momentum to initialize the selfdestruction sequence).
I would also test on a meadow instead of hard surfaces and far away from people.