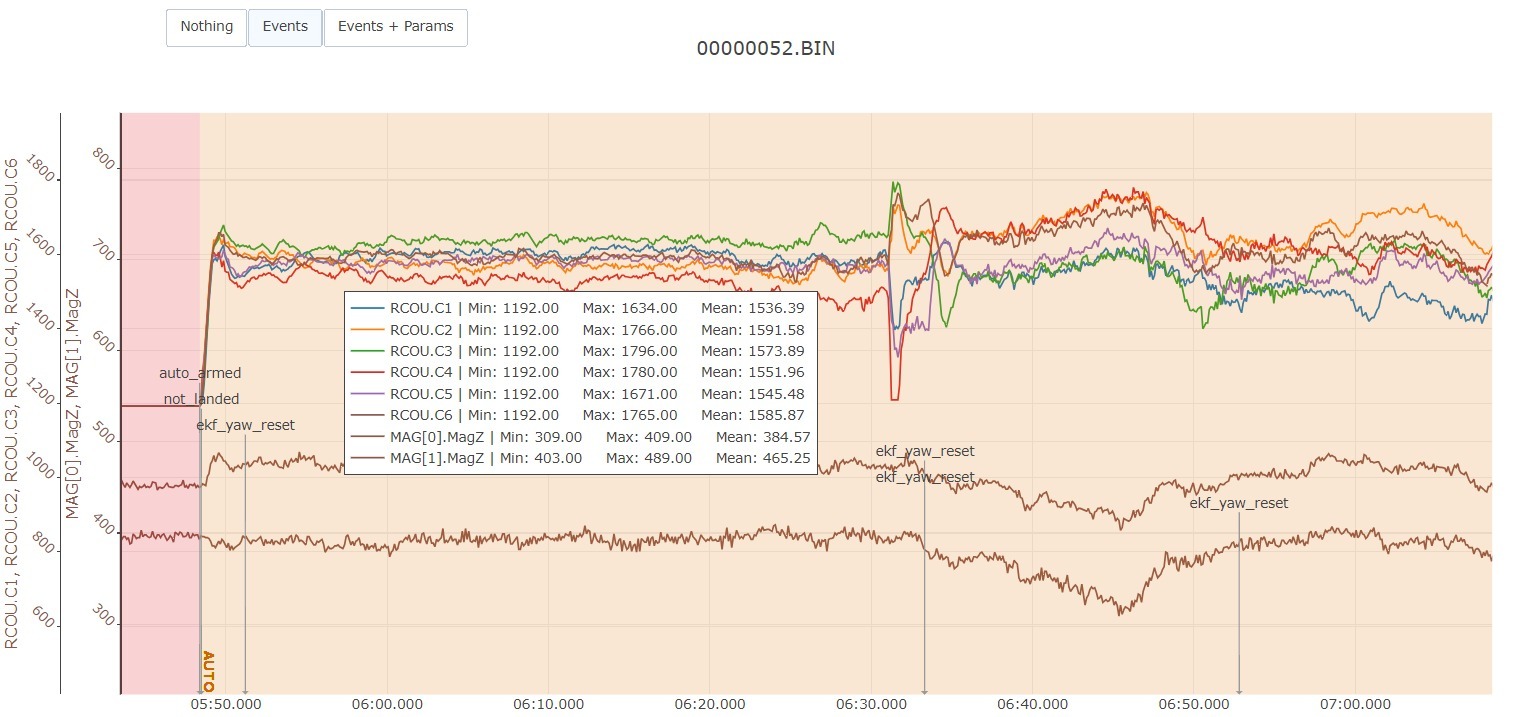
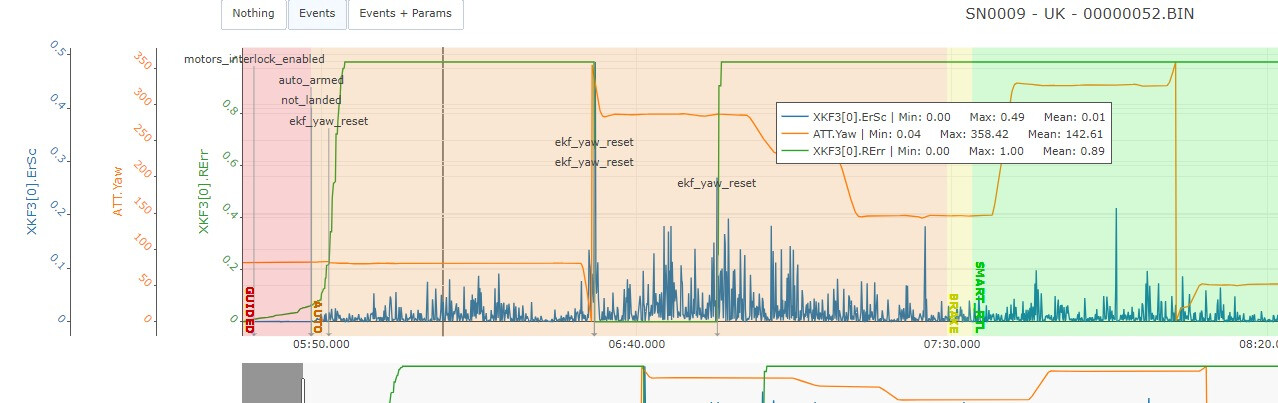
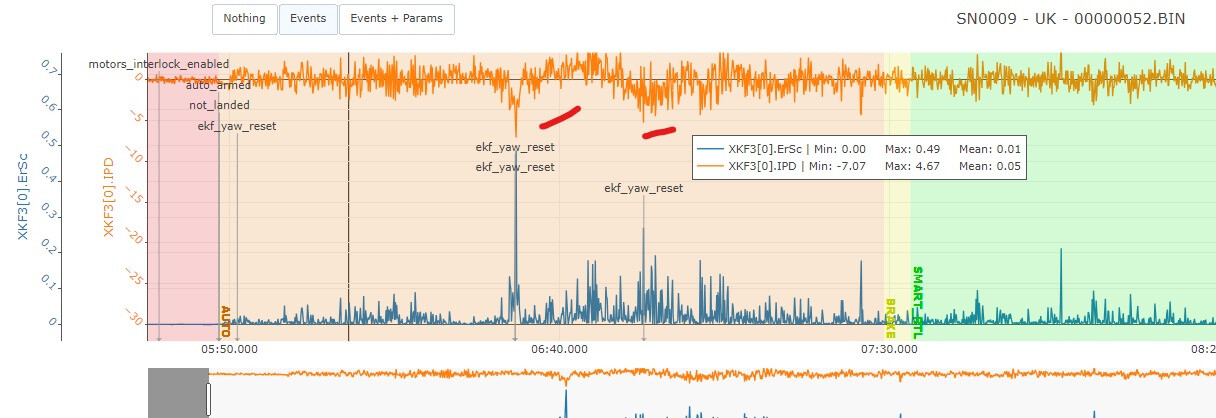
The compasses are affected by the current draw.
This is not a great flight for it, but I ran the log through Magfit anyway and these parameters should give you better compass performance.
If you can do a flight with a couple of circles, yaw (on axis) and maybe a figure 8 - that would give a better log to further improve the compass calibration.
GNSS update rate will benefit from a minor change to select less constellations too (choose 5 or 65, whichever gives you quickest time to a 3D Fix with lowest HDOP).
GPS_GNSS_MODE,5 // or 65
GPS_GNSS_MODE2,5 // or 65
COMPASS_DIA_X,1.002
COMPASS_DIA_Y,1.067
COMPASS_DIA_Z,0.946
COMPASS_DIA2_X,1.007
COMPASS_DIA2_Y,1.045
COMPASS_DIA2_Z,0.900
COMPASS_DIA3_X,0.800
COMPASS_DIA3_Y,0.800
COMPASS_DIA3_Z,0.800
COMPASS_MOT_X,0.477
COMPASS_MOT_Y,-0.168
COMPASS_MOT_Z,0.173
COMPASS_MOT2_X,0.002
COMPASS_MOT2_Y,0.051
COMPASS_MOT2_Z,-0.352
COMPASS_MOT3_X,4.971
COMPASS_MOT3_Y,-10.000
COMPASS_MOT3_Z,-1.361
COMPASS_MOTCT,2
COMPASS_ODI3_Z,-0.200
COMPASS_ODI_X,0.023
COMPASS_ODI_Y,-0.036
COMPASS_ODI_Z,0.022
COMPASS_ODI2_X,0.009
COMPASS_ODI2_Y,-0.042
COMPASS_ODI2_Z,0.032
COMPASS_ODI3_X,-0.200
COMPASS_ODI3_Y,0.200
COMPASS_OFS_X,-183
COMPASS_OFS_Y,-507
COMPASS_OFS_Z,376
COMPASS_OFS2_X,-241
COMPASS_OFS2_Y,-139
COMPASS_OFS2_Z,645
COMPASS_OFS3_X,324
COMPASS_OFS3_Y,421
COMPASS_OFS3_Z,750
COMPASS_SCALE,1.00
COMPASS_SCALE2,1.00
COMPASS_SCALE3,1.00
For general tuning you can start with:
INS_ACCEL_FILTER,10
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.2
INS_HNTCH_FREQ,30
INS_HNTCH_BW,15
INS_HNTCH_FM_RAT,0.7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
And send another log of just hovering and some movements in AltHold (mostly) and a bit in Loiter.
Here’s some about Magfit, there’s even a scripted flight been developed to better aid compass calibration.