Trying to get my Here2 working with CAN. But I did just for fun try i2c. It works kind of directly.
But I get EKF2 inconsistent YAW a lot. Like 20-30 times in 5 mins. Did attach the log, maybe someone know if there is something wrong or just that I am indoors. No battery connected.
Have you used the compass mask to make sure that ardupilot is seeing the CAN compass?
Unfortunately in the current versions of ardupilot, Can compass starts last, which means you are probably looking at an onboard compass
Yes I did before I decided to try i2c after many hours. Has leaved it at i2c since then.
I have never been able to see any compass from the Here2 unit. Now it is in auto. But I will mask it to the three known types soon. Or should I mask all others, how about redundancy? Is anything lost if masking the intenals while using external?
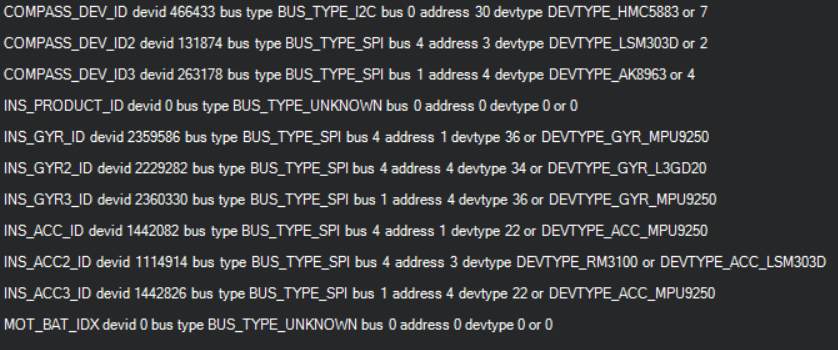
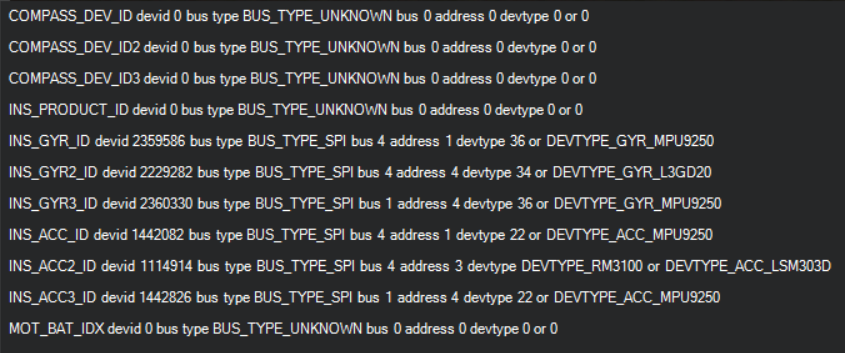
Can’t remember. I think you’re right! I guess that log is with HW ID 1 and 2 as internal and HW ID compass 3 not found. When masking all except UAVCan. No compass can be found.
I did put second GPS on top instead. Then the issues is gone. I use 3DR GPS/compass, instead. Square, semitransparent black thing with uBlox. That compass is always found and as first compass in HW ID.
Did some switch back and fourth, but nope, no Here2 compass found in i2c.
The flat cable in the Here is always bended quite bad, like the wires needs to be formed in an short S-shape to get the PCB back down. May that lenght could be adjusted in future builds. Or the cable holder maybe can be a bit redesigned a bit more out the get more fittng space. This is just constructive feedback. May some people have broken cables out there? May my compass leads in the i2c is broken?
It is hard to measure these connectors while bending the cable, but got many good zero ohm readings when I did checking the CAN cable.
Hmm, about the cable, no twisted can pairs could that be the issue? I saw someware it is possible to adjust the CAN speed. Can that help to easier get CAN contact for the users?
Sorry for brainstorming. May I need some sleep here.
Yes! Oh simple… thank you Philip!
They are breathing blue and then solid green since boatloader was installed through Can. Then with software installed it was green also. But never found since then as Can device.
Do you know why my compass in Here2 can’t be found in i2c?
If I wanna quick switch to V3.7 to test something about CAN, if just “save parameters” does it saves just every setting? Like I will not calibrate anything if it was calibrated when the parameter file was written?
May I have two different a parameter files that is made from scratch configuration with V3.6.10 and another for V3.7?
I have a SN65HVD230 CAN bus transceiver and Arduinos always at home, if there is anything I can check stand alone. Just send questions and instructions. I am always willing to follow and help to reach that plug and play day faster.