Hello professionals/enthusiastic/hobbyist
I am really struggling with my quad. I have a Tdrone M1000 assembled quad. Everything was working fine till i tried to implement Emlid RTK. In POS HOLD mode, The copter tried to pitch down and then even when I had cut the throttle to minimum in did an unpredictable pitch up. I had then taken it to stabilise mode and was able disarm with a lot of struggle.
I am very new to this domain. Kindly help me to find the error. I will be thankful if you could spare some of your precision time to help me out with this.
I am attaching the drive link for the video and the logs for the same.
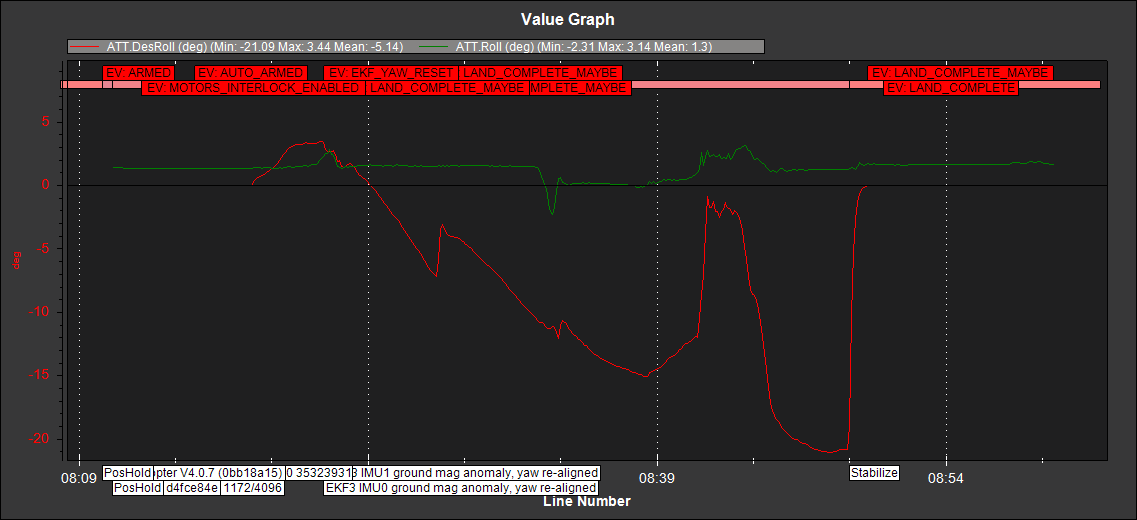
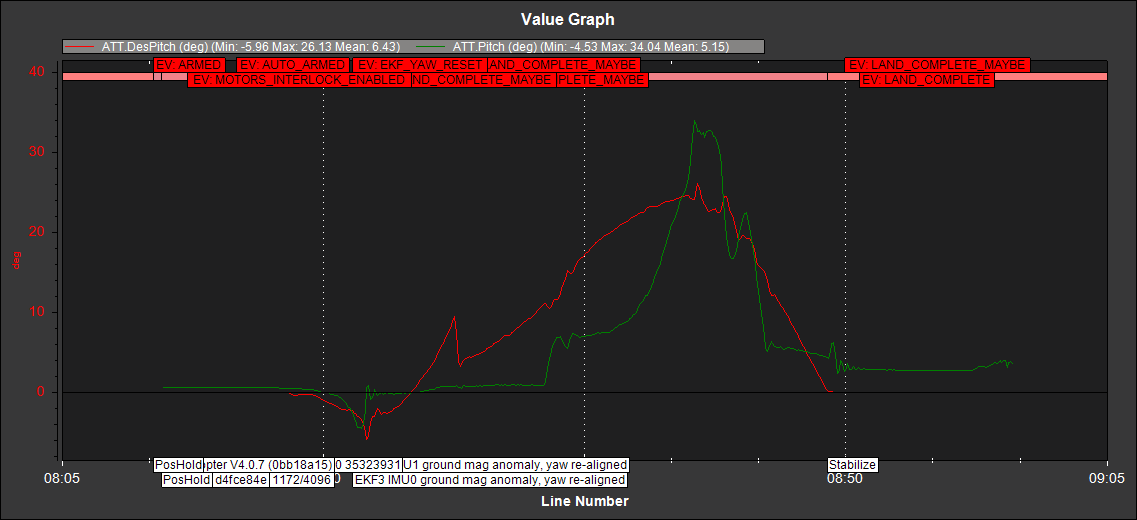
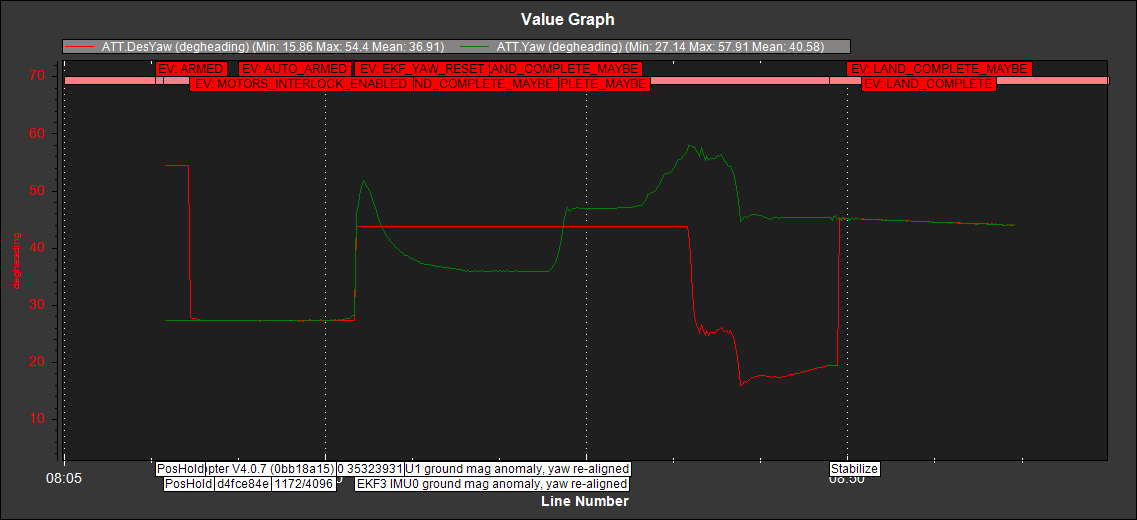
Your desired attitude and achieved attitude don’t match at all. Your copter is poorly tuned.
Also because your copter is touching the ground for all time, any movements trying to hold its position will end up pitch or roll dramatically. The GPS position shifts a little over time, such that it involves a lot of micro motions to maintain position.
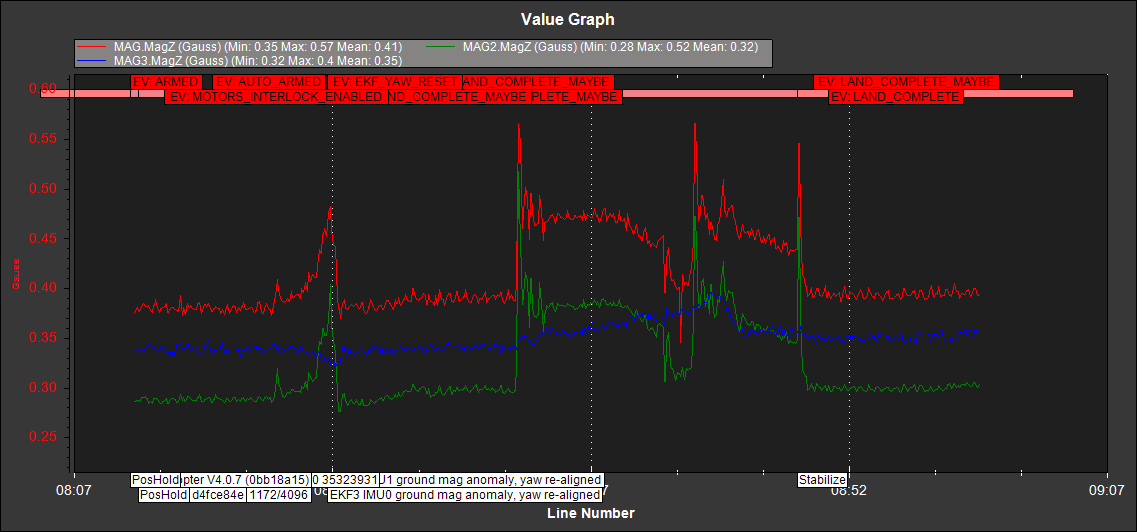
Mag3 is inconsistent with the other 2. Since it is the one on Cube Black fixed board, it can be easily interfered by electronics around. You may consider turn it off to not confusing the EKF.