Hello everyone,
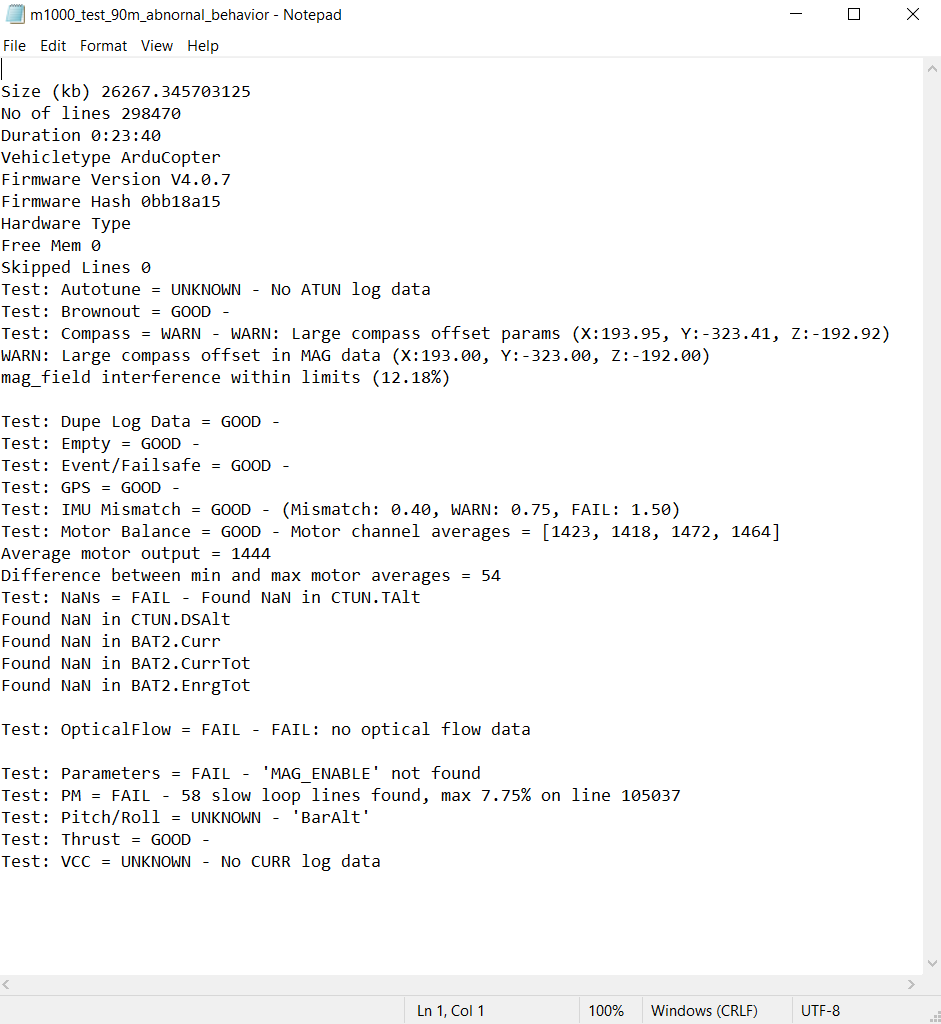
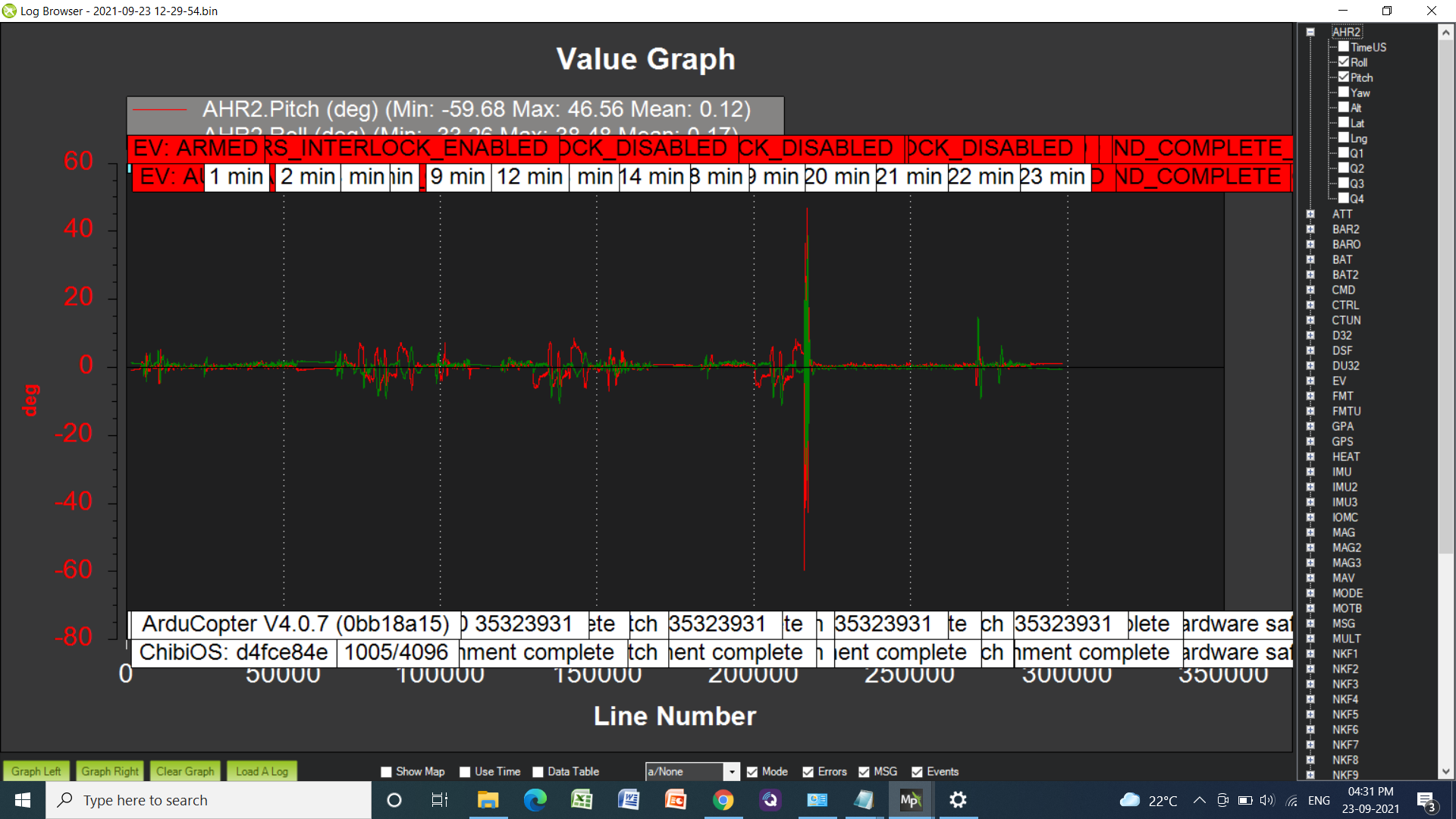
We have got a problem while doing a mission with cube black FC and T-motor M 1000. The drone started a pretty scary erratic movement in pitch and roll axis on switching to ‘land’ flight mode after completion of an autonomous mission. I request the fellow pilots, developers and enthusiastic community to please help us to find the error. I am attaching the flight log and the video of HUD from mission planner for reference (google drive link attached)
Pitch and roll got a bit out of control, no real indication why. I suspect tuning is a big contributor.
Your current sensing is wrong, best to fix that.
It seems you’ve not set initial parameters to suit prop size and battery - connect to MissionPlanner and press Alt A and accept all that it offers.
Also set these:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
After getting the initial params all done, set these for Harmonic Notch Filter data gathering
INS_HNTCH_ENABLE,1
INS_LOG_BAT_MASK,3
and lets see a log of just some gentle hovering for over a minute.
The next phase of setting up the Harmonic Notch Filter will be
INS_HNTCH_REF, hover_thrust
INS_HNTCH_FREQ, peak freq from FFT
INS_HNTCH_BW, peak_freq / 2
INS_HNTCH_ATT,40
INS_LOG_BAT_OPT,2
hover & dynamic test >1 minute, check FFT results
then finally:
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
no extra logging, assumes HNOTCH is working great
Now you can run Autotune !
How to get MOT_THST_EXPO set correctly if you still see instability after tuning.
set too high you can see instability at low throttle
set too low you can see instability at high throttle
Hi Shawn, we have checked all these parameters. Everything works fine, we have even done over 10 missions after this incident but didn’t encounter any problem. This was a one-time scary glitch.