I am using a 3D Printed Quadplane, the firmware I am using is, V4.5.1. with a Pixhawk Cube Orange+ and GPS is Here 3. I had a maiden for Transition, The plane was fine in Q_Loiter and Q_Stabilize. upon shifting to FWBA, the Cruise motor started but then stopped and I started getting an error for Compus variance/offset. and the plane started to become unstable.
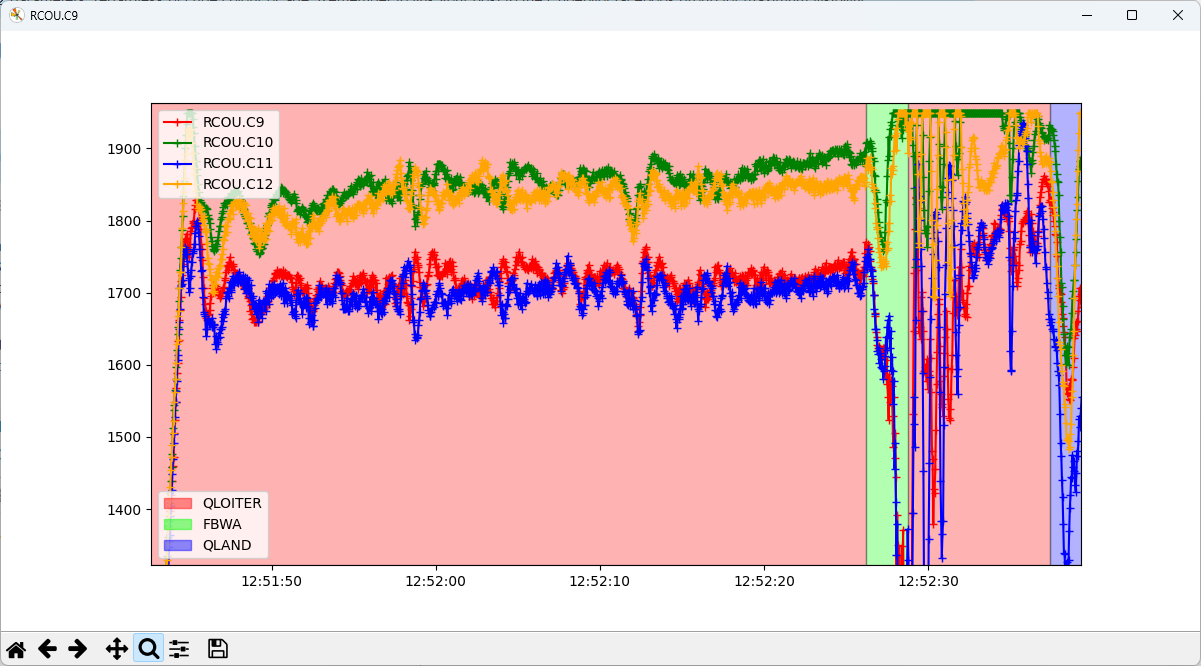
@Aleem_Siddiqui looking at the logs. You can see that motors are actually saturating and there is a clear imbalance in the front and back thrust requirement. You will need to update the aircraft and make sure that all four motors sit in the 40-60% range while hovering, and are not in an imbalanced situation as seen in the motor outputs from your log. You also want your plane to be slightly nose heavy to gain better control in fixed wing mode as well, from the looks of it your rear motors are working extremely hard to keep it level. Currently it seems like its quite tail heavy.