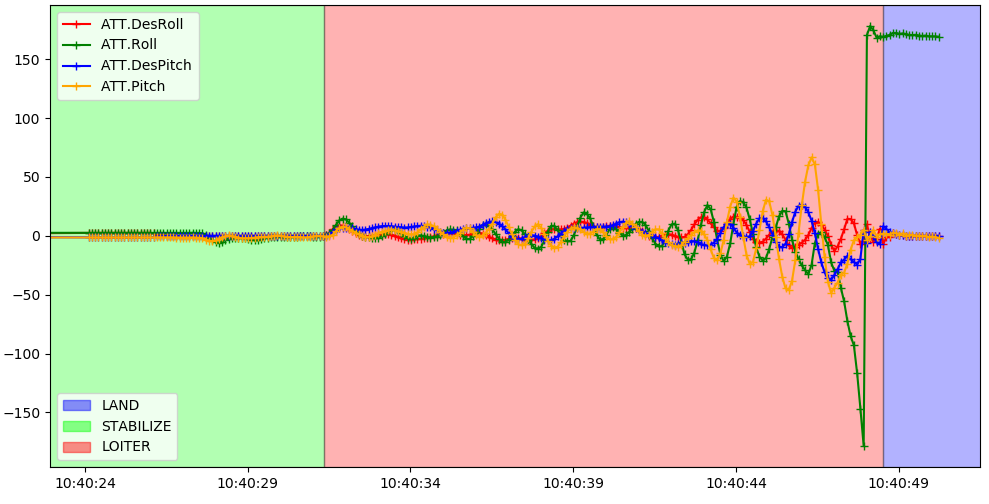
Drone crashed on first flight. On arming and in Stabilise mode drone took off immediately without me applying throttle. I switched to Loiter and the drone started to become increasingly unstable until it flipped over and crashed. Any help would be appreciated.
I had the similar issue a week ago, but I was alone and don’t have the video footage, just the photo after the crash. My problem was the PID setting that was done manually and when I had the acceptable result in the pitch direction the same PID’s were copied to the roll setup. Seems that is not the good idea for the Y6 frame. Those interference oscillations came after the sudden roll move and sudden stop in the loiter mode. Stabilize mode fixes it up but I did it too late. I have a big drone too.
It flies with it although I am not satisfied. I’ll give it a try with AutoTune next week and if it survives I’ll send you a new parameters list.
Seems like it is hard to get the stable performance with large props and low kv motors.
If it took off just by touching the throttle or by arming, the copter is probably over powered. What’s the T/W? Trying switching off motor spin on arm parameter by setting it to zero. Reduce minimum motor spin parameter a bit, if you feel your copter is over powered.