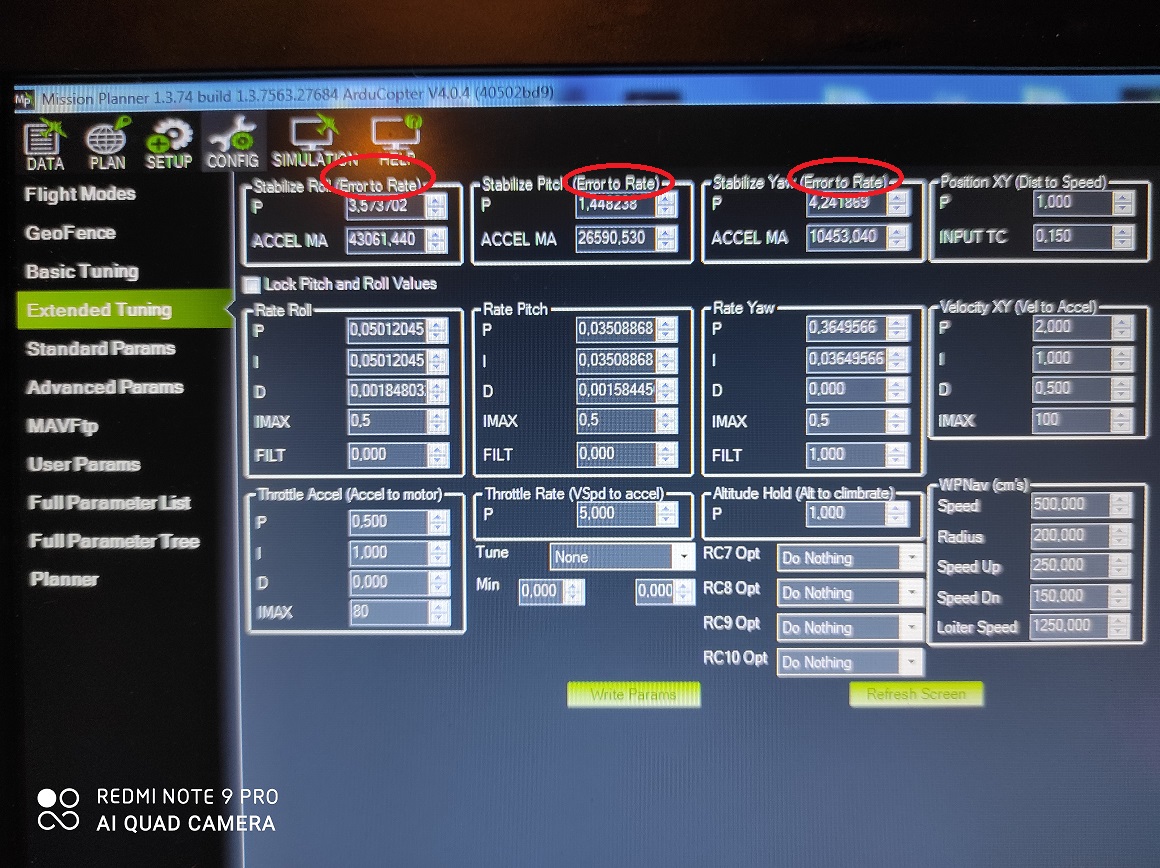
I made first time autotune flight. Roll … pid … yaw … everything looked good. Drone had completed everything, I flew down. Control to feel good. Autotune was on and power off the drone. Next day i tried to fly: stabilize mode on and take drone up, control was slow (control delay) and I couldn’t fly, too dangerous. Picture shows the PID settings. Apparently I need to do a new autotune flight. Could someone look at the bin file and tell if there was something wrong. Thank you again.
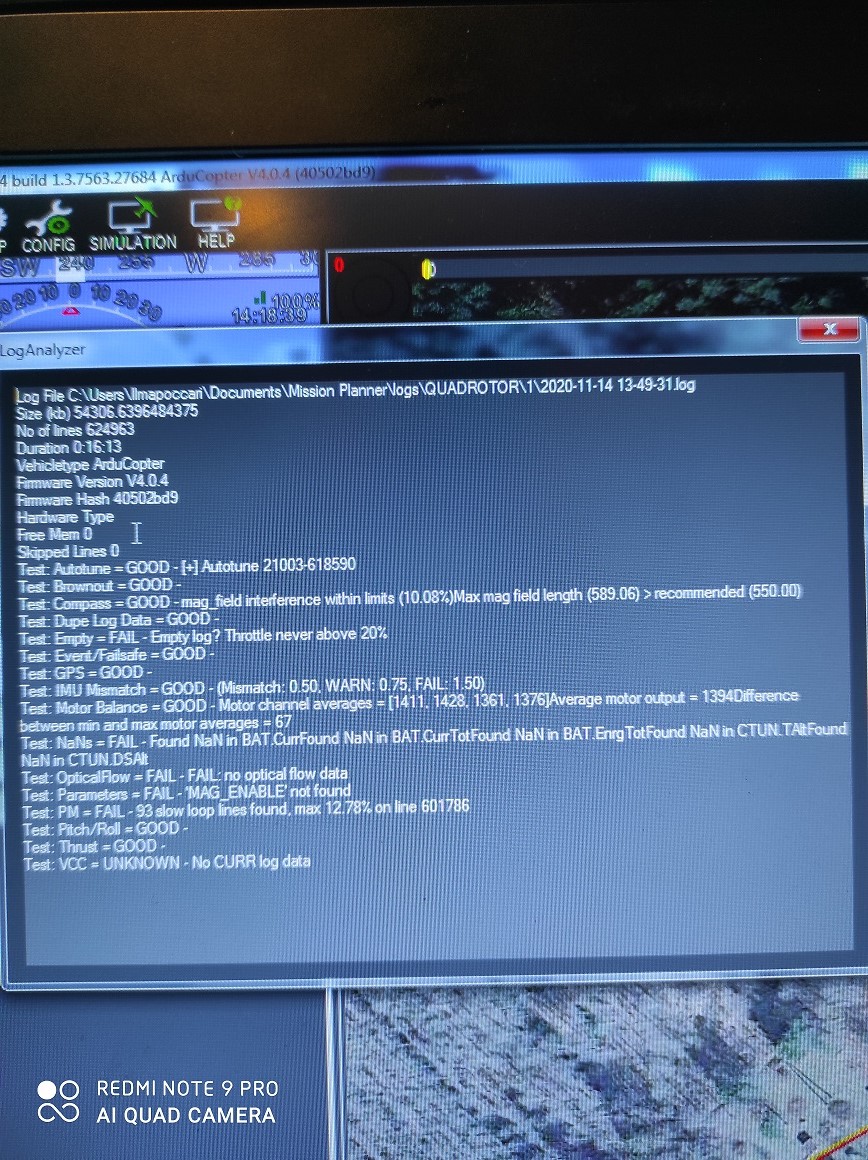
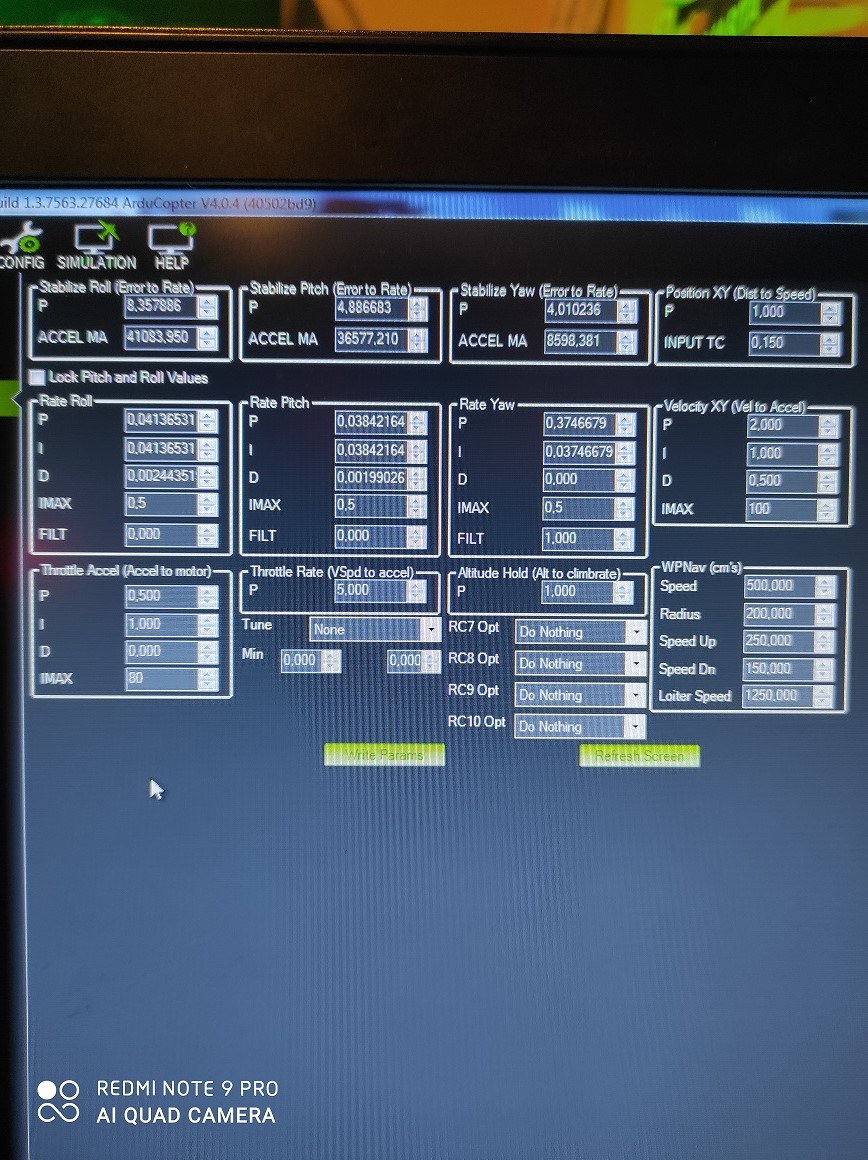
I did another autotune flight. Still “Error to Rate”. During the flight solex TX announced: connection lost, but the control worked and completed the autotune flight. Then I take the power off “autotune mode was on”. Can I see the reason for something " why Error to Rate"
bin: https://drive.google.com/file/d/1HcF7wvvAg3iOrrGWI42Su5q-95UG88_S/view?usp=sharing
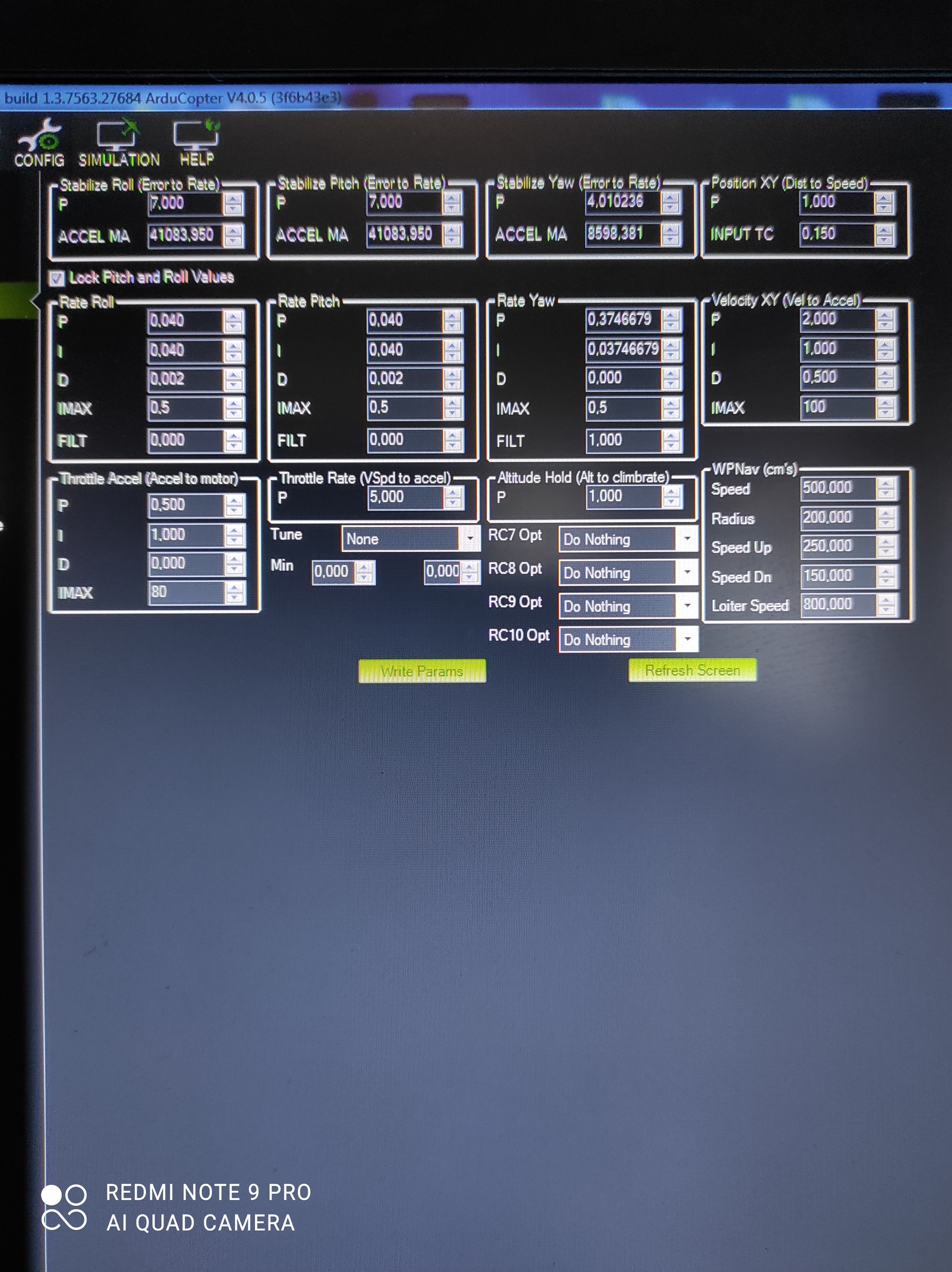
Hi, Now is latest firmware. SD card has been in cube. I’ve made a manual adjustment, because autotune adjustments didn’t work well. I tested Loiter mode (video). What needs to be adjusted to get double braking of. Thank y.