Hi all,
I got my cube black / f450 clone out of storage recently and finally got out to the field. Can someone take a look and tell me what next steps for making this quad more solid are?
Bin: https://drive.google.com/file/d/1VQjmtdzpCWPrSr2YEJzOIA5MbFWyoV1M/view?usp=sharing
Log File C:\Users\brennan\AppData\Local\Temp\tmp2DAE.tmp.log
Size (kb) 31446.107421875
No of lines 357076
Duration 0:15:50
Vehicletype ArduCopter
Firmware Version V4.0.5
Firmware Hash 3f6b43e3
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
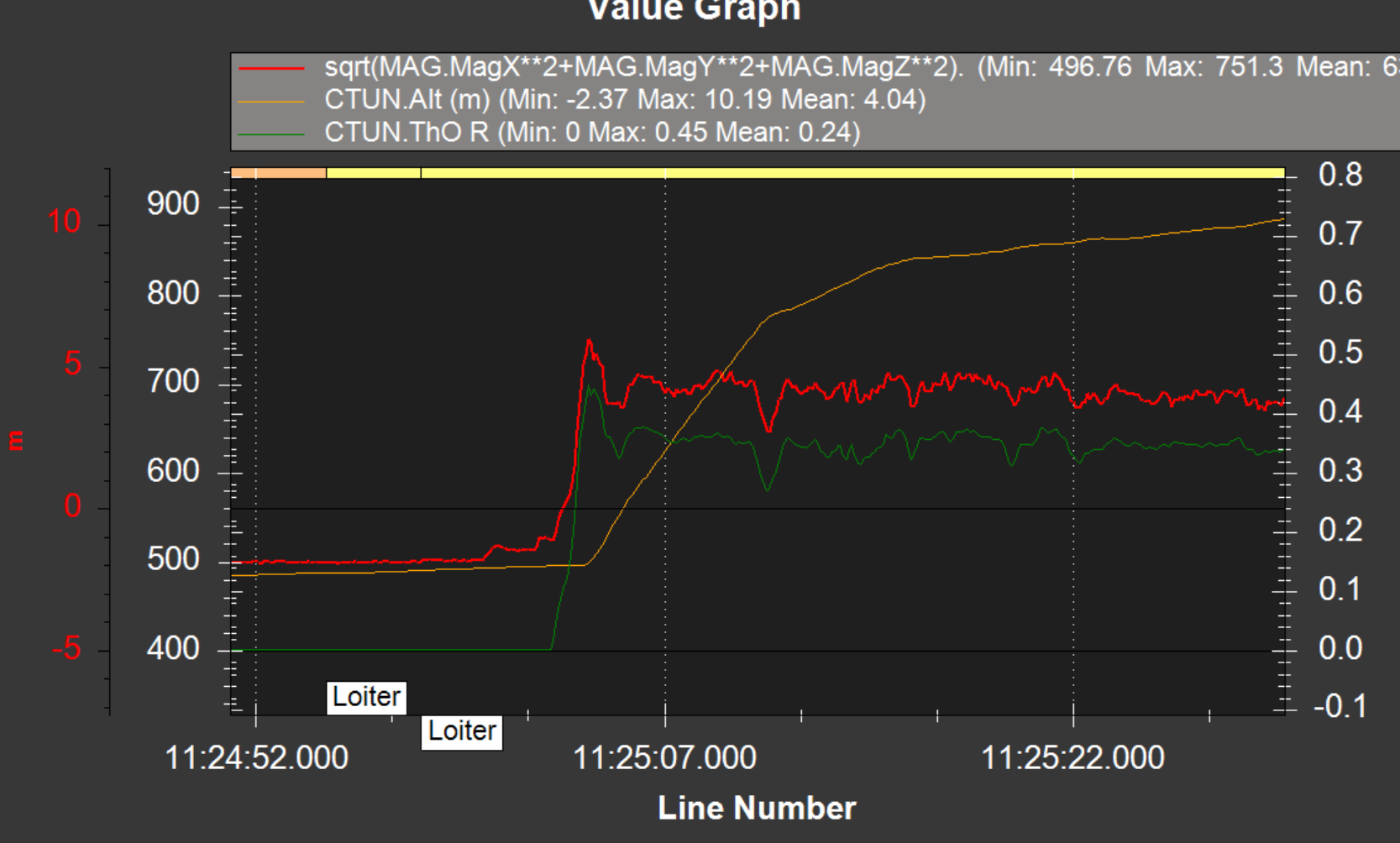
Test: Compass = FAIL - Large change in mag_field (129.69%)
Max mag field length (1133.72) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.30, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = WARN - Motor channel averages = [1446, 1497, 1506, 1538]
Average motor output = 1496
Difference between min and max motor averages = 92
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = FAIL - 68 slow loop lines found, max 7.80% on line 173641
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data