When I touch Takeoff on my screen it gives me a desired altitude which I can change at anytime during my flight no issues there. I followed every step in https://ardupilot.org/copter/docs/tuning-process-instructions.html for 15 inch props shame on me right decided to start with a tarot 960…
anyways this new log
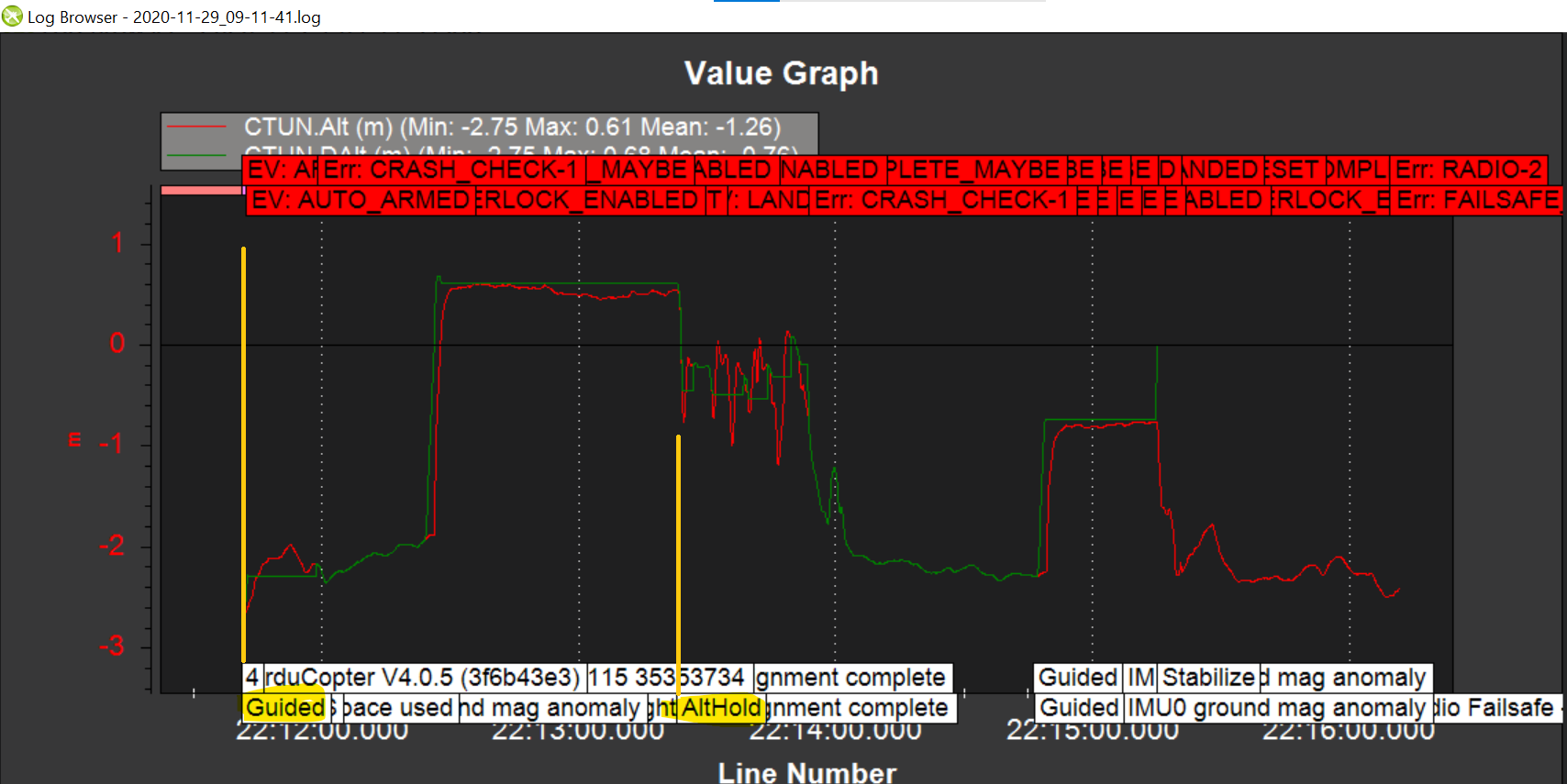
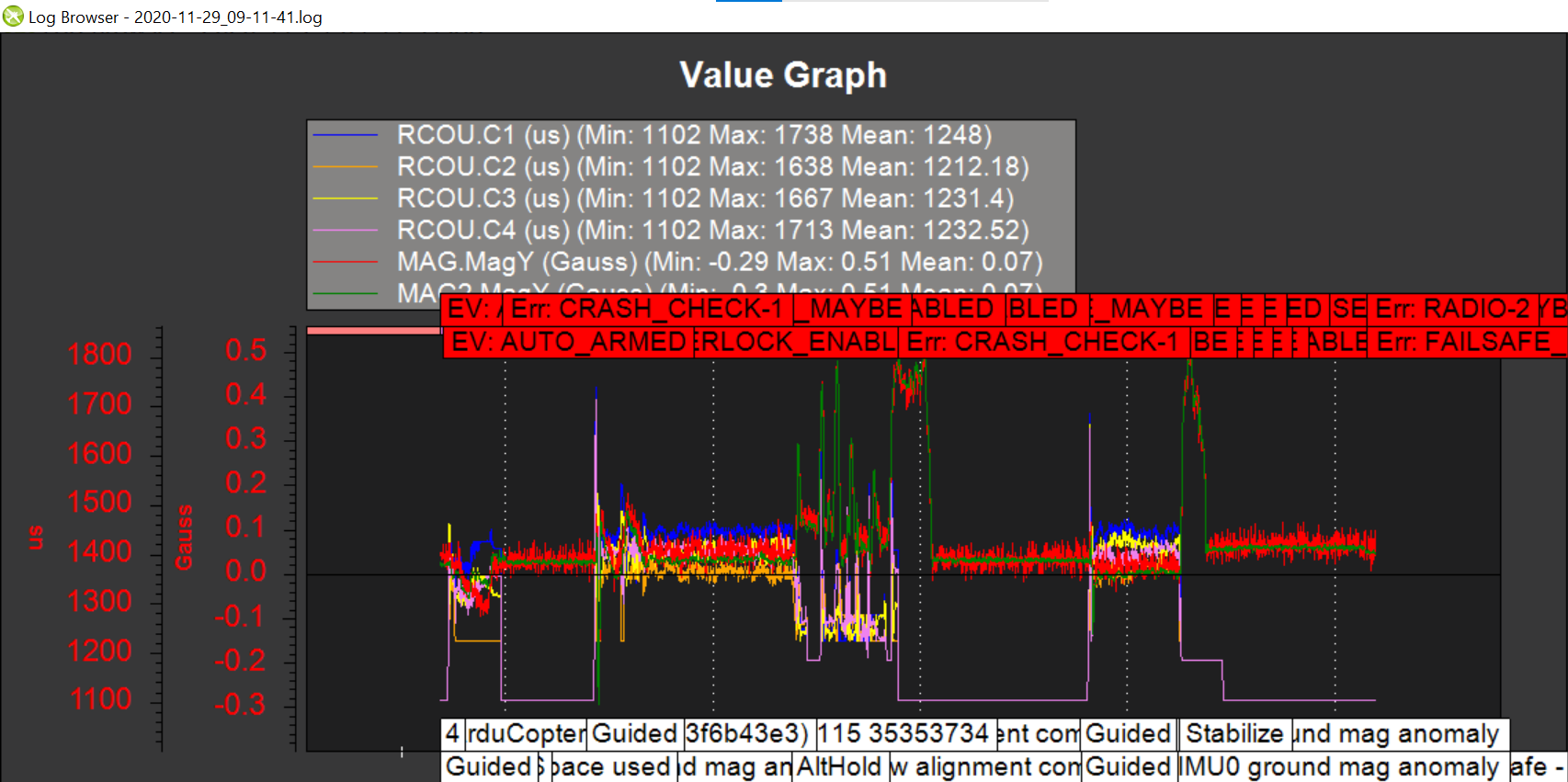
False crash didn’t leave ground too little predefined take off a ALT
First takeoff 5 feet ish everything’s fine switch to ATL HOLD drone slowly starts to fall to ground then I caught it with my hand and disarmed after a few seconds of screwing around. Second takeoff 4 feet ish everything’s fine switch to STABILIZE drone falls quickly catch drone with hand place on ground.
If I choose any mode before take off then tap take off and choose altitude it automatically goes to guided. If I switch it to any other mode after its taken off it gives me problems. Can I even put the Herelink in manual mode and do a take off without doing a controller mod? I’ve seen a few video of ppl doing that for fix wing stuff.
Alvin thank you! I have an arm button on my screen and turns out I have roll and pitch when I do a manual take off the only thing is that I can’t actually fly it like that the throttle is too sensitive and requires me to do a controller mod if I would like the stick to stay were i place it. I still need to troubleshoot mode change drops/crash. Alt Hold should mean the copter stays in the same place but it uses raw input from the controller. Does anyone know how to set up so that mode changes on the herelink controller does not affect altitude? I can not to autotune unless I figure this out.
I need to figure out how to make hover = throttle midpoint
So when I switch modes and the stick is at center the input = hover and not a negative based on parameters where my copter falls to ground.
Does anyone know how to make these parameter changes?